地铁盾构区间施工测量技术研究
摘 要:结合哈尔滨地铁八标段盾构区间施工测量方案和实际测量工作,从控制测量、联系测量和盾构机施工测量3个主要方面介绍地铁盾构区间施工各环节的主要测量工作,并以盾构机施工测量为重点,详细介绍盾构机施工测量的各项技术方法。在介绍各项观测技术的同时,还将探讨提高各项施工测量精度的方法和措施。对其他地铁盾构区间施工测量工作有一定的借鉴作用。
关键词:地铁;盾构;区间施工测量
一、引 言
盾构施工技术以其安全高效、可穿越复杂底层的特点,在地铁、大型引水工程及城市市政建设中被广泛采用。与传统地铁施工方法(如明挖法、盖挖法、浅埋暗挖法等)相比,盾构法的优点是安全、速度快,不影响地面交通,不受气候条件影响和适用于各种不同地层状况,是加速发展城市地铁的有效手段[1]。盾构施工采用的工艺不同于传统施工方法,因此其测量手段与传统测量手段既紧密联系又有很多不同。盾构法施工中所采用的有效合理的测量措施,是确保工程施工安全、高效的重要保障[2-5]。
为适应城市建设快速发展的迫切需求,哈尔滨市选择修建地铁来缓解交通压力,其中地铁八标段区间隧道从工程大学站出发向北沿南通大街进入太平桥站,设计里程范围为SK13+680. 336~SK14+561. 785,总长为881. 449m。区间沿线主要为多层建筑物,地下管线较多,路面交通繁忙,地形起伏较大。本段区间隧道纵坡为单坡,最大坡度为22‰,最小平面曲线半径约2 000m,该标段选用盾构区间施工法。本文以该标段盾构区间施工中的相关测量技术为例,详细介绍了地铁盾构区间施工测量的方法与技术,希望能为相关工程提供借鉴。
二、控制测量
1.地面平面控制测量
从地面向地下采用导线测量方法进行定向,垂直角应小于30°,定向边中误差应小于±8″。精密导线只有两个方向时,按左右角观测,左右角平均值之和与360°的较差小于4″。水平角观测遇到长、短边需要调焦时,应采用盘左长边调焦,盘右长边不调焦;盘右短边调焦,盘左短边不调焦的观测顺序观测。每条导线边应往返观测各两个测回,每测回间应重新照准目标,每测回3次读数。测距时每测回3次读数的较差小于3mm,测回间平均值的较差应小于3mm,往返平均值较差小于5mm。气象数据每条边在一端测定一次。
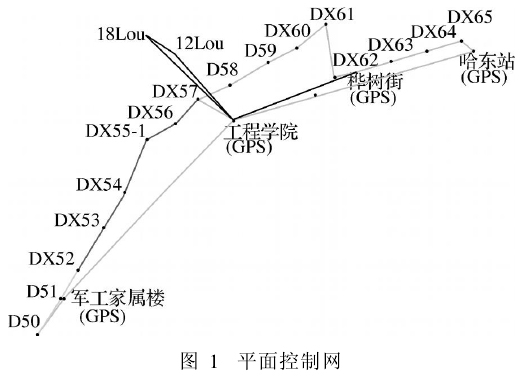
本标段平面控制网分为3个导线网(如图1所示),从DTI20—DTI10起始边至DTI20—DTI10终止边作为第1段导线网,以DTI20—DTI10起始边至DTI11—DTI10终止边作为第2段导线网,从DTI22—DTI10起始边至DTI22—DTI10终止边作为第3段导线网。
2.地面高程控制测量
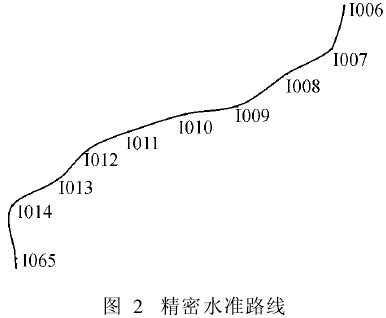
在本标段业主提供了11个精密水准点,并利用I065、I016两个精密水准点构成附合水准路线(如图2所示)。在车站附近先做附合水准路线然后再做趋近水准,将高程传递到车站附近。水准测量均按二等水准测量作业指标执行,每一测段的往测与返测分别在上午和下午进行施测(也可在夜间观测)。
3.地下控制导线测量
地下控制导线分为施工控制导线和施工导线,施工控制导线由洞外联系测量所确定的导线点直接延伸而来。地下导线是一条支导线,它指示盾构推进方向,因此对精度要求很高。根据盾构内径空间,选择稳固、位置适当的地方建立施工导线点,组成施工控制导线。观测台由钢板焊接而成,采用强制对中装置,利用螺栓固定在管片侧壁上。施工控制导线随隧道的掘进而延伸,尽量按等边直伸导线布设,平均边长约150m,特殊情况下导线边长不得小于100m。曲线隧道施工控制导线埋设在曲线元素点上,边长大于60m,测设精密应满足导线测量技术要求。因盾构隧道中的管片在一定范围、一定时间内总是处于动态的,因此在洞内控制导线向前延伸时必须检查后3个导线点的稳定情况,如有较大变动,应再向后检测直至满足为止。然后应用稳定的导线点重新测量移动的点,并用新坐标向前延伸,施工控制导线在隧道贯通前测量3次,测量时间与竖井定向同步。重合点重复测量的坐标值与原测量坐标值较差小于10mm时,采用逐次加权平均值作为施工控制导线延伸测量的起算值。
4.地下高程控制测量
盾构进洞掘进后,将高程引至洞内控制导线点上作为高程与平面共用控制点,测量时须满足二等水准测量的技术要求。作为施工导线用的吊篮高程可由洞内控制水准点用水准测量方法引测。地下控制水准测量应在隧道贯通前独立进行3次,并与地面向地下传递高程同步。重复测量的高程点与原测点的高程较差应小于5mm,并应采用逐次水准测量的加权平均值作为下次控制水准测量的起算值。
三、联系测量
1.高程传递
高程传递是采用钢尺导入法,将地面水准点高程传递到地下的水准点[6-7]。高程传递应独立进行3次,并与竖井定向同步,互差应满足限差要求。
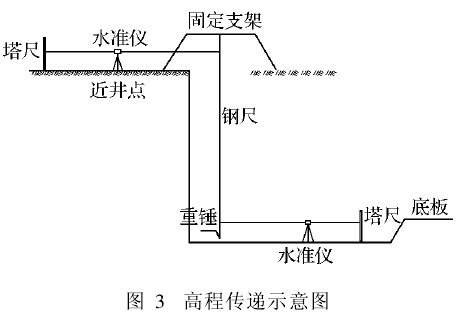
钢尺导入法是传统的竖井传递高程方法(如图3所示)。将钢尺悬挂在支架上,在尺的零端挂一重锤并垂于井下,其重量应为检定时的拉力。地面高程按二等水准测量技术要求传递到近井水准点A,在地上和地下安置两台水准仪同时读数,即地上、地下水准仪分别读取A点水准尺读数a和钢尺读数m及B点水准尺读数b和钢尺读数n(独立观测3测回,每测回变动仪器高度),3个测回的高差应小于3mm。观测时应量取地上地下的温度,测定的高差应进行温度改正和尺长改正。
按式(1)计算B的高程,即为盾构始发及掘进的高程控制的依据
HB=HA+a-[(m-n)+Δl+Δt]-b (1)
式中,Δt为钢尺温度改正数,即Δt=α[t平-t0]l(t平是地上、地下的平均温度, t0是钢尺检定时的温度,l=m-nΔl为钢尺尺长改正数);α为钢尺膨胀系数,取0.000 012 5°C。
2.竖井定向
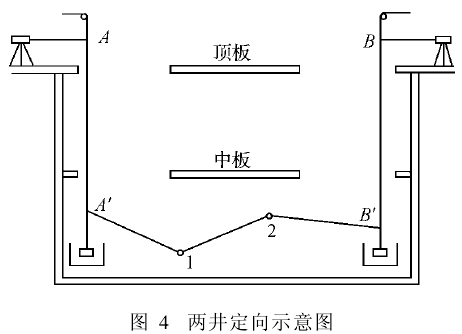
竖井定向是为了统一地上、地下平面直角坐标系统。隧道贯通前的联系测量工作不应少于3次,宜在隧道掘进到100m、300m以及距贯通面100~200m时,分别进行一次测量,目的是确定地下起始点和起始边在地面坐标系统中的平面坐标和方位角。在隧道内须建立支导线,起始边的方位角误差对隧道各导线点的影响随各点与起始点的距离成正比增大。两井定向法通过增大两根钢丝的距离来减小钢丝的投向误差,并提高起始边的方位角精度。
两井定向工作包括投点和连接测量两部分(如图4所示)。车站建成后,分别在车站两端竖井处各投挂一根钢丝,采用单荷重投影法,在每根钢丝上下两端适当位置上粘贴棱镜片,分别为A、B和A′、B′。在车站附近的加密导线点上架设全站仪,测出两根钢丝到导线点的角度和距离,从而计算出A、B的坐标。注意投点时先在钢丝上挂以较轻的荷重,徐徐将其下入井中,然后在井底换上作业重锤,放入盛有机油或阻尼液的桶内,但不能与桶壁接触。在车站底板适当位置上设置两个比较稳固、采用强制对中装置的观测台,分别为1、2。井下连接的任务是测设导线A′—12—B′,目的是测定井下两个导线点1、2的坐标和所构成边的方位角,此两点即为盾构始发及掘进的平面控制的依据。地面上测角和测距以及地下的导线测量均按精密导线测量的技术要求执行。
四、盾构机施工测量
1.盾构机姿态测量原理
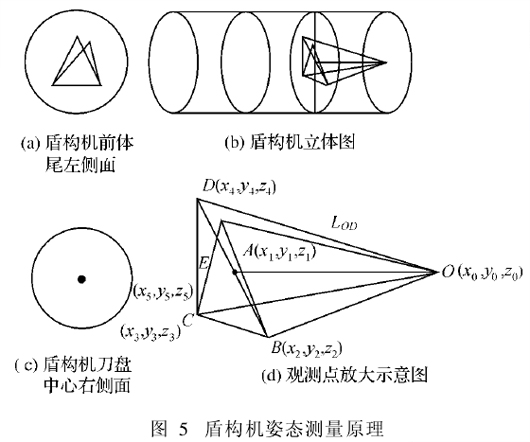
盾构机是一个近似圆柱的维体,在开始隧道掘进后不能直接测量其刀盘的中心坐标,只能间接推算[8-9]。在盾构机壳体内选择观测点的位置非常重要,要求既要利于观测,又要利于保护,且空间关系稳定。如图5所示,O点是盾构机刀盘中心;A、B是在盾构机前体与中体交接处螺旋机根部下面的两个选点;C、D是螺旋机中段靠下侧的两个点;E是盾构机中体前断面的中心坐标;A、B、C、D4点上都贴有测量反射片。由A、B、C、D、O5点所构成的两个四面体中,测量出每个角点的三维坐标(xi, yi, zi)后,把每个四面体的4个点间的相对位置关系和6条边的长度Li计算出来,作为以后计算的初始值,在其后的掘进施工过程中Li是常量,通过测量A、B、C、D4点的三维坐标,用xi、yi、zi、Li就能计算出O点的三维坐标。同理,A、B、C、D、E5点也可以构成两个四面体,可相应求出E点的三维坐标。由E、O两点的三维坐标和盾构机的绞折角可计算出盾构机刀盘中心的水平偏航、垂直偏航,由A、B、C、D4点的三维坐标可确定盾构机的扭转角度,从而达到检测盾构机的目的。
2.盾构机始发测量
盾构机始发测量包括盾构机定位测量、反力架定位测量、盾构机姿态初始测量等[10]。
1)盾构机导轨定位测量。主要控制导轨的中线与设计隧道中线偏差不能超限、导轨的前后高程与设计高程不能超限、导轨下面是否坚实平整等。
2)反力架定位测量。包括反力架的高度、俯仰度、偏航等,以及反力架下面是否坚实、平整。反力架的稳定性直接影响到盾构机始发掘进是否能正常按照设计方位进行。
3)盾构机姿态初始测量。包括测量水平偏航、俯仰度、扭转度。盾构机的水平偏航、俯仰度是用来判断盾构机在以后掘进过程中是否在隧道设计中线上前进,扭转度是用来判断盾构机是否在容许范围内发生扭转。
3.盾构机姿态人工复测
在盾构施工过程中,为了保证导向系统的正确性和可靠性,在盾构机掘进一定长度或时间之后,应通过洞内的独立导线独立检测盾构机的姿态,即进行盾构姿态的人工检测[11]。
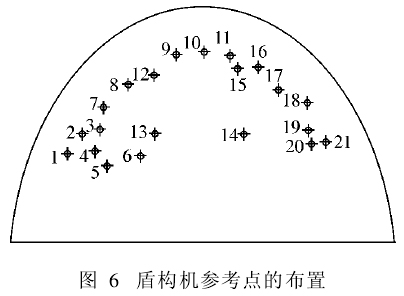
1)盾构机参考点测量。盾构机组装时生产厂家已在盾体上布置了盾构姿态测量参考点(如图6所示,共21个),并精确测定了各参考点的三维坐标,盾体前参考点及后参考点实际上是虚拟的,并不存在。在进行盾构姿态人工检测时可直接利用这些相关数据,测站位置选在盾构机第一节台车的连接桥上,此处通视条件非常理想,便于架设全站仪,只要在连接桥上的中部焊上一个全站仪的连接螺栓就可以了。测量时应根据现场条件尽量使所选参考点之间的连线距离大一些,以保证计算精度,最好保证左、中、右各测量一两个点,这样可以提高测量计算的精度。
2)盾构姿态计算。先把已知参考点的相对坐标(至少3个点)输入至CAD文件中,再把每次所测相同编号参考点的三维绝对坐标输入到同一个CAD文件,利用CAD里面的“对齐”命令,通过测量垂线在水平和垂直方向上的偏离值来求解盾构机前后点的姿态。
4. SLS-T导向系统初始测量
SLS-T导向系统初始测量包括:隧道设计中线坐标计算、TCA托架和后视托架的三维坐标测量、VMT初始参数设置和掘进等工作。
1)隧道设计中线坐标的计算。将隧道的所有平面和高程曲线要素输入到VMT软件,VMT就会自动计算出每间隔1m的隧道中线的三维坐标。隧道中线坐标需经过其他办法多次复核无误后方可使用。
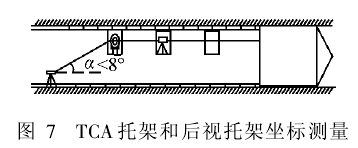
2) TCA托架和后视托架的三维坐标测量(如图7所示)。TCA(智能型全站仪)托架上安放全站仪,后视托架上安放后视棱镜。通过人工测量将TCA托架和后视托架中心位置的三维坐标测量出来后,作为控制盾构机姿态的起始测量数据。
3) VMT初始参数设置。将TCA中心位置的三维坐标及后视棱镜的坐标、方位角输入控制计算机“station”窗口文件,TCA定向完成并启动计算机上的“advance”后,照准激光标靶测量其坐标和方位。根据激光束在标靶上的测量点位置和激光标靶内的光栅,可以确定激光标靶的水平和竖直位置,再根据激光标靶的双轴测斜传感器可确定激光标靶的俯仰角和滚动角,TCA可以测得其与激光靶的距离。以上资料随推进千斤顶和中折千斤顶的伸长值及盾尾与管片的净空值(盾尾间隙值)一起经掘进软件计算和整理,盾构机的位置就可以数据和模拟图形的形式显示在控制室的电脑屏幕上。通过对盾构机当前位置与设计位置的综合比较,盾构机操作手就可采取相应措施尽快且平缓地逼近设计线路。
5.盾构掘进测量
盾构开挖隧道是利用设置在盾构上的激光导向系统进行导向的。隧道施工测量则是采用地下施工控制导线点和施工水准控制点逐次重复测量成果的加权平均值作为起算数据。
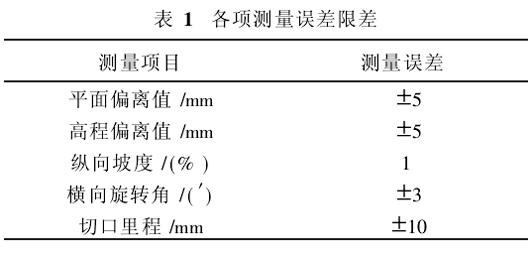
盾构法掘进隧道施工测量包括盾构井(室)测量、盾构拼装测量、盾构姿态测量和衬砌环片测量。采用联系测量方法将测量控制点传递到盾构井(室)中,并利用测量控制点测设出线路中线点和盾构安装时所需要的测量控制点,测设值与设计值较差应小于3mm。安装盾构导轨时,测设同一位置的导轨方向、坡度和高程与设计较差应小于2mm。盾构拼装竣工后,进行盾构纵向轴线和径向轴线测量,主要测量内容包括刀口、机头与盾尾连接点中心、盾尾之间的长度测量;盾构外壳长度测量;盾构刀口、盾尾和支承环的直径测量。盾构机与线路中线的平面偏离、高程偏离、纵向坡度、横向旋转和切口里程的各项测量误差限差应满足表1的要求。
测定盾构机实时姿态时,测量一个特征点和一个特征轴,选择其切口中心为特征点,纵轴为特征轴。利用隧道施工控制导线测定盾构纵向轴线的方位角,该方位角与盾构本身方位角的较差为方位角改正值,并以此修正盾构掘进方向。
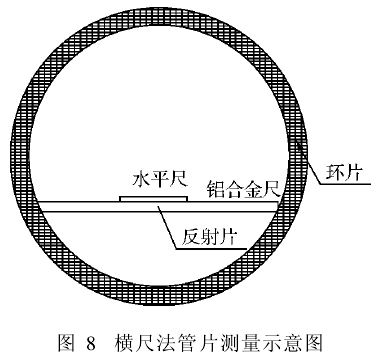
6.衬砌环片测量
衬砌环片测量采用横尺法,测出衬砌环的水平偏差和垂直偏差(如图8所示)。管环的内径为2. 7m,采用铝合金制作一水平尺,水平尺长可根据实际情况进行调整。在水平尺正中央贴一反射片,根据管环、水平尺、反射贴片的几何尺寸,就可以计算出管环中心与水平尺上反射片中心的实际高差[12]。测量时,先把水平尺精确整平,再用全站仪测量出水平尺上反射贴片中心的三维坐标,就可以推算出管环中心的三维坐标。每次管环测量时,应重叠五环已经稳定的管环,以消除测错的可能。
盾构掘进测量以SLS-T导向系统为主,辅以人工测量校核。利用盾构上所带的SLS-T自动激光隧道导向系统及图像靶来完成隧道内盾构机位置、形态及管片位置等隧道内的测量工作,并通过控制系统随时进行调整[13-14]。SLS-T导向系统能够全天候动态显示盾构机当前位置相对于隧道设计轴线的位置偏差,盾构机可根据显示偏差及时调整盾构机的掘进姿态,使得盾构机能够沿着正确的方向掘进。为了确保导向系统的准确性、确保盾构机能够沿着正确的方向开挖,每周进行两次人工测量复核。
五、结束语
本文结合哈尔滨地铁八标段盾构区间施工测量方案和实际测量工作,从控制测量、联系测量和盾构机施工测量3个主要方面介绍了地铁盾构区间施工各环节的主要测量工作,并以盾构机施工测量为重点,详细介绍了盾构机施工测量的各项技术方法。根据文中介绍的技术和方法,成功完成了哈尔滨地铁八标段盾构测量任务,对其他地铁盾构区间施工测量工作有一定的借鉴作用。
参考文献:
[1] 王暖堂.盾构隧道施工中的测量技术研究[J].铁道建筑, 2002(12): 1-5.
[2] 潘国荣,王穗辉.地铁盾构施工中的若干测量手段及方法[J].测绘通报, 2001(1): 23-25.
[3] 肖智勇,傅继阳.地铁区间隧道盾构法施工中的测量技术[J].暨南大学学报:自然科学版, 2005, 26(3):331-336.
[4] 吕宏权.浅析地铁盾构隧道的施工测量[ J].隧道建设, 2005, 25(5): 65-67, 75.
[5] 汪玉勤.长区间盾构施工地铁隧道的测量控制方法[J].铁道勘察, 2007(2): 1-3, 7.
[6] 徐浩,杨卓.盾构竖井联系测量的几种方法探讨[J].山西建筑, 2009, 35(6): 353-354.
[7] 罗三明,万文妮,高培芝,等.盾构工程竖井联系测量数据处理方法研究[ J].大地测量与地球动力学,2007, 27(5): 123-127.
[8] 王超领,张永超.地铁盾构机掘进实时姿态定向测量的研究[J].隧道建设, 2007, 27(6): 33-35, 38.
[9] 李国华.盾构机姿态控制点测量模型及其应用[J].隧道建设, 2006, 26(SO): 19-22.
[10] 任福松,金建俊.地铁施工中的盾构机姿态控制研究[J].交通标准化, 2009(9): 134-137.
[11] 徐浩,杨卓.地铁盾构施工中人工测量盾构机姿态的方法[J].山西建筑, 2009, 35(4) : 355-357.
[12] 秦长利.提高盾构施工测量精度的要点及方法[J].北京测绘, 2003(3): 1-3.
[13] 潘国荣,王穗辉,陈传林,等.盾构姿态自动测量系统的开发与应用[ J].同济大学学报:自然科学版,2010, 38(3): 459-463.
[14] 唐争气,赵俊三,彭国新.盾构机实时姿态测量和计算方法的研究[ J].土木工程学报, 2007, 40 (11):92-97.























 京公网安备 11010202007575号
京公网安备 11010202007575号