VMT自动导向系统在盾构法施工中的应用
摘 要 利用自动仿真技术,结合应用广泛的测量仪器,针对盾构法地铁施工,采用无线数据传输功能,方便、快捷地将盾构机掘进姿态以图形和文字的双重效果实时显示在计算机屏幕上, 指导盾构机操作手调整盾构掘进参数,可真正实现操作可视化、同步化。
关键词 控制测量 联系测量 导向系统 盾构法 地铁施工
1引 言
盾构法施工工艺目前已经被绝大多数城市轨道交通工程予以采用。本文通过对国内城市轨道交通盾构法施工工艺的研究及成都地铁1、2 号线一期工程的实践,介绍地铁盾构施工中的控制测量、联系测量、盾构机自动导向系统,其中重点介绍海瑞克盾构机配置的VMT 导向系统的应用和研究。
2控制测量
2.1 平面控制测量
2.1.1 平面控制测量概述
地铁施工领域里平面控制网分两级布设, 首级为GPS 控制网,二级为精密导线网。 施工前建设单位提供一定数量的GPS 点和精密导线点,施工单位根据自身需要在标段范围内加密导线点, 以满足在施工过程中测设工作的需要。
2.1.2 地面平面控制测量
在业主交接桩后, 施工单位要对所交桩位进行复测,同时在所交桩的基础上加密精密导线点;特别是在始发井附近,一定要保证有足够数量的控制点。
控制测量采用导线边角测量方法进行,测量仪器应符合下列精度要求:角度≧2″,距离≧1.5 mm+2×10-6D/2.4s,人工测量应不低于 4 个测回。
2.1.3 地下平面控制测量
洞内导线控制网是隧道掘进的基本框架, 洞内施工控制导线一般采用双支导线的形式向前传递,然后将双支导线最前点连接起来, 构成复合导线的形式。如果是在满足条件的成型隧道内,应尽量构成三角控制网的形式进行测设。测量精度要求同于地面测量。
洞内控制导线点一般采用在隧道最大跨度附近安装强制对中托架,这样测量起来非常方便,且可以提高对中精度,同时不影响洞内运输。
2.2 高程控制测量
2.2.1 高程控制测量概述
高程控制测量主要包括地面精密水准测量和高程传递测量及洞内精密水准测量,在一般情况下,城市地铁领域里的精密水准测量按城市二等水准测量标准施测。
2.2.2 地面高程控制测量
在业主交桩后,应及时对桩位进行复测,同时在标段范围内加密高程控制点, 在始发井附近不得少于1 个,根据情况也可以用导线点作为高程加密点。
2.2.3 地下高程控制测量
由于成型隧道一般都需要进行水平运输,底部铺设了钢轨, 所以在布设洞内高程控制点时一定要确保点位不能突出最低轨面, 否则很容易被电动机车破坏; 但也不应过低, 应避免被隧道底部淤泥掩埋,造成不必要的重测。
2.3 联系测量
2.3.1 联系测量概述
根据《城市轨道交通施工及验收规范》要求,成型隧道的贯通中误差,横向不超过±50 mm、竖向不超过±50 mm。 为了确保最终的贯通精度,必须及时将地面控制网传递至地下空间,控制网传递的过程称为联系测量。
2.3.2 定向测量
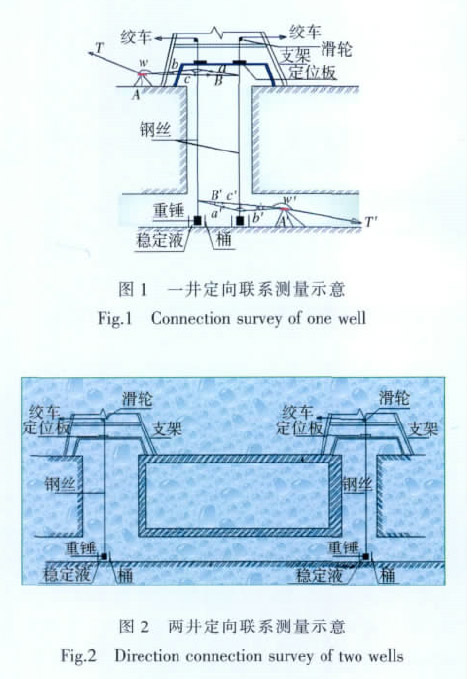
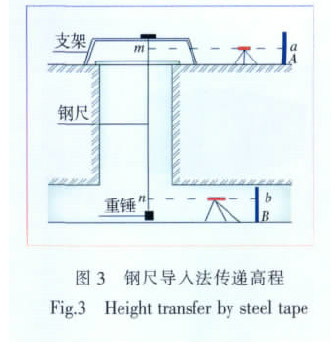
联系测量主要有一井定向、两井定向、铅垂仪、陀螺经纬仪联合定向等方式, 其中陀螺经纬仪联测精度最高,仪器设备较为先进,一般单个区间隧道超出1 000 m 时可采用陀螺定向。
一井或两井定向受地面及洞内各种因素的制约较少,而且仪器设备较为传统,在地铁隧道施工中应用较为普遍(图 1、图 2)。 通过定向测量将地面控制网的边角要素传递至地下埋设的导线点, 通过严密平差计算即可得到地下控制点位的坐标。
2.3.3 高程传递测量
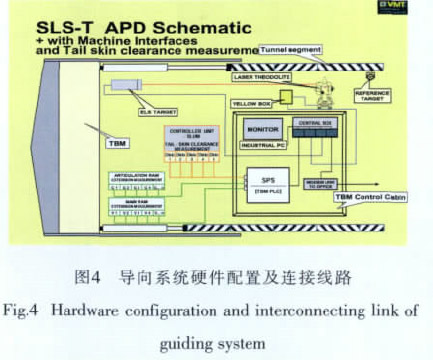
高程传递测量一般采用悬挂钢尺的方法,钢尺需经过专业鉴定,且要进行温度和尺长调整。如果有斜井或通道,也可以用水准测量的方法向井下传递高程。在仰俯角不大的前提下, 也可以直接用全站仪三角高程的办法传递高程。 钢尺导入法传递高程如图 3 所示。
3 VMT自动导向系统
3.1 导向系统功能
在隧道掘进过程中, 为了避免盾构机发生意外的运动及方向的突然改变, 必须对盾构机位置和隧道设计轴线(DTA)的相对位置关系进行持续地监控测量, 以便于盾构机操作手能够按照设计路线精确地操纵掘进,VMT 自动导向系统通过运用基本测量原理,结合仿真技术,可将在土层中向前掘进的盾构机模拟成清晰可见的图形型式,并辅以文字标识,实时展现在盾构机操作手面前。此系统可视化程度高,可为实时掘进提供所有重要信息。
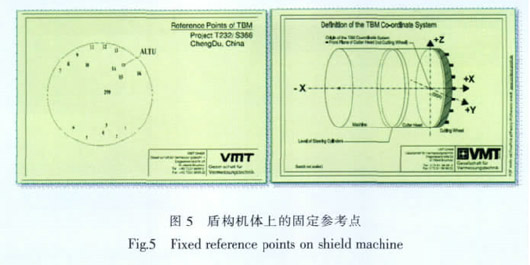
3.2 导向系统硬件(图 4)
3.2.1 导向系统硬件配置及连接线路
导向系统是由激光全站仪(TCA)、中央控制箱、电子激光靶(ALTU)、黄盒子和计算机及掘进软件组成。
3.2.2 各附属硬件功能介绍(表 1)

3.3 VMT 导向系统测量原理
3.3.1 坐标系统
VMT 导向系统采用了 3 种不同的坐标系统。
(1)大地坐标系统:即全球坐标系统,是整个工程路段在局部或全国意义上的位置描述,用来计算所有的固定点、起点和中间点。前面所述的地面控制测量、联系测量及地下控制测量,其目的就是为了将盾构机掘进线路纳入到大地坐标系统。
(2) DTA系统:在本系统中显示盾构机前、后基准点的里程和偏离值(图2)。 它可实时显示盾构机相对于DTA 的偏移值。
(3)盾构机自身坐标系统:在盾构机前、中盾位置安装了ALTU 靶和若干个固定参考点, 这些点位有着固定的相对关系,每个点位和ALTU 靶分别在不同的平面上,构成了盾构机的立体空间结构,其中盾构机的中轴线作为本坐标系的纵向轴,与其垂直的两条线作为本坐标系的横向轴和竖向轴(图5)。
3.3.2 自动仿真技术概述
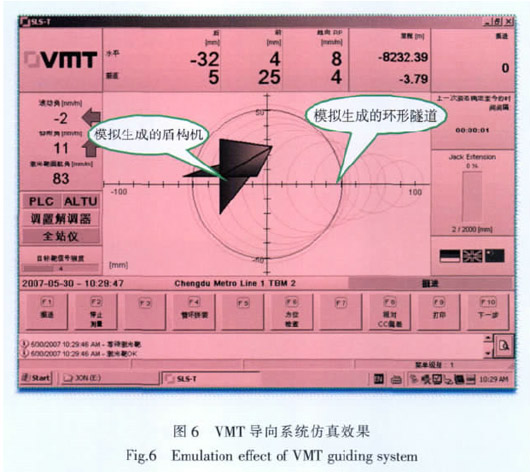
在盾构机掘进过程中, 全站仪自动跟踪测量ALTU 靶的位置, 根据 ALTU 靶和参考点之间固定的相对关系,推算整个盾构机刚体的实际位置,然后计算出盾构机中心线上前、后基准点相对设计轴线的位置关系, 最终由中央控制箱综合 ALTU 靶的信息和全站仪的定位数据, 并及时传递至工业电脑的专业软件;软件对这些数据进行调用,并模拟生成正在掘进中的盾构机的实际姿态, 辅以文字标识 (图6), 盾构机操作手即可根据效果显示调整合适的掘进参数,使成型隧道趋近完美。
3.4 导向系统软件
3.4.1 安装
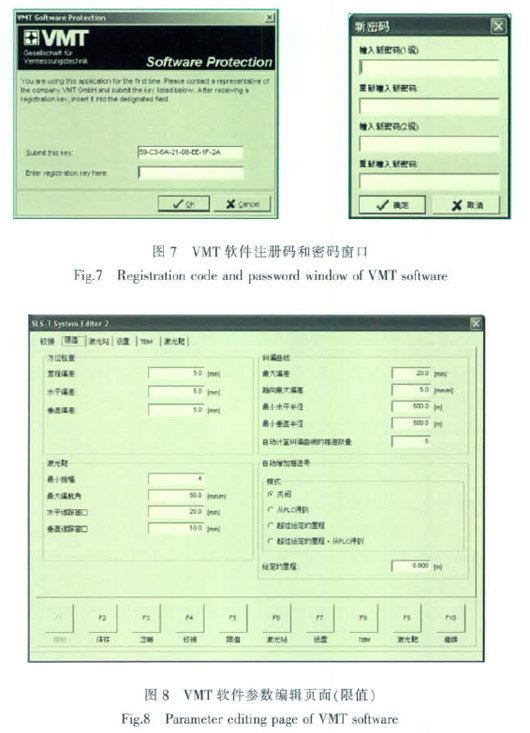
盾构机操作室和管理人员地面办公室电脑上都应安装VMT 专业软件,安装程序可由 VMT 专业工程师提供,并获取相应权限的注册码和使用密码(图 7)。
3.4.2 重要操作运用
软件安装完成后,根据不同的权限就可以进行相应的操作, 其中最重要的就是初始参数的编辑、DTA 的计算。
初始参数编辑是对整个VMT 测量系统参数的设置, 是测量系统各参照要素间相对位置关系的数据描述,也是软件准确运行的基础(图 8)。

DTA 是整个软件运行的核心,是由专业人员将隧道设计轴线用VMT 软件进行计算(图 9),然后输入到计算机中。 DTA 是盾构机掘进的轨迹,盾构机操作手就是根据软件的图形和数据显示, 从而正确地得出盾构机的实际推进位置和隧道设计轴线之间的偏差,并不断地改变掘进参数。
4结论
VMT 导向系统以方便、快捷和直观的友好界面充分发挥“盾构机眼睛”的作用,在目前盾构法施工工艺中具有良好的应用前景。
VMT 导向系统是建立在传统测量基础上的技术研发, 因此要求主管人员必须具备基本的测量操作技能。 同时在实际的运用过程中仍然有诸多操作细节需要不断地改进和完善, 需要一线操作人员不断地进行理论研究, 最终探讨出在隧道相对恶劣环境下最理想的操作模式。
参考文献
References
[1] 张正录.工程测量学[M]. 武汉:武汉大学出版社,2003
Zhang Zhenglu. Engineering Surveying [M]. Wuhan: Wuhan University Press, 2003
[2] GB50026-1993 工程测量规范[S].北京:人民交通出版社,1993
GB50026-1993 Code for Engineering Surveying [S]. Beijing: China Communications Press, 1993
[3] 周文波.盾构隧道施工技术与应用[M].北京:中国建筑工业出版社,2004
Zhou Wenbo. Shield Tunneling Technology [M]. Beijing: China Architecture & Building Press, 2004
[4] 张 恒,陈寿根,邓稀肥.盾构掘进参数对地表沉降的影响分析[J].现代隧道技术,2010,47 (5): 48~53
Zhang Heng, Chen Shougen, Deng Xifei. Analysis of the Influence of Shield Driving Parameters on Ground Settlements [J]. Modern Tunneling Technology, 2010, 47 (5): 48~53
[5] 张国营,傅国利 .盾构法施工过程的有限元模拟[J].岩土工程技术,2007, 21 (6):275~278
Zhang Guoying, Fu Guoli, 3D Finite Element Simulation Analysis on Tunnel Shield Driven Process [J]. Geotechnical Engineering Technique, 2007, 21 (6):275~278
[6] 张凤祥,朱和华,傅德明.盾构隧道[M].北京:人民交通出版社,2004
Zhang Fengxiang, Zhu Hehua, Fu Deming. Shield Tunnelling[M]. Beijing: China Communications Press, 2004























 京公网安备 11010202007575号
京公网安备 11010202007575号