基于SVPWM的直线电机地铁的驱动控制
摘 要:地铁列车用直线感应电动机( LIM) 驱动,具有转弯半径小、爬坡能力强、结构简单、体积小、维护少、运行可靠等众多优点,已经在城市轨道交通中得到了很好的应用。为进一步推广、应用直线电机地铁,介绍了一条自主设计的直线感应电动机驱动的地铁试验线。采用无线遥控控制,设计了基于空间矢量脉宽调制( SVPWM) 的控制系统,在实验室中进行了模拟试验。试验结果表明该套控制系统能满足机车在试验线上运行时的各种工况并可靠地工作。
关键词:轨道交通; 地铁; 直线感应电机; 空间矢量脉宽调制
0 引 言
直线电机驱动的地铁由直线感应电动机( LIM) 产生驱动力推动车辆运行,而不再依靠轮轨之间的摩擦力传递动力,与传统旋转电机驱动的地铁相比,具有振动小、噪声低、爬坡能力强、通过曲线半径小、结构简单、体积小、造价低、能耗低、污染小、安全性能高等众多优点[1-5]。正是因为这些优点,加拿大、日本、美国、马来西亚和我国相继建设了若干条直线电机地铁线路[6-7]。目前我国广州地铁 4 号线、5 号线已经采用直线电机技术,选线优势明显,运行效果良好,广州地铁6、7 号线将采用直线电机技术[8-9]; 首都国际机场线也采用直线电机驱动。虽然直线电机地铁在我国获得了应用,但是目前我国使用的直线电机地铁是由中国南车集团、中国北车集团跟川崎重工、伊藤忠、庞巴迪等外资企业联合生产的,一些关键部件、机车电力传动控制等关键技术都是引进吸收的,因此研究直线电机驱动和控制地铁技术,对我国推广、应用直线电机地铁具有重要意义。
本研究针对直线电机地铁试验线组建了一个可靠的控制系统,采用无线遥控控制,设计了基于 SVPWM调制的 VVVF 控制策略,并在实验室中进行了模拟测试和分析。
1 轨道交通试验线介绍
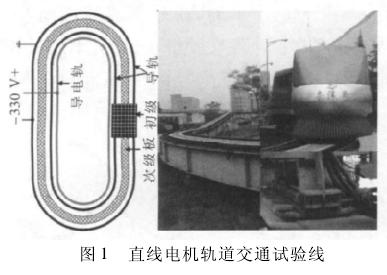
浙江大学航天电气及微特电机研究所和上海南洋电机有限公司合作共建了国内首条直线电机轨道交通试验线,该试验线由直流供电室、地面控制室和轨道线3 部分组成。
直流供电室提供稳定的直流电压( 约为 330 V) ,该电压通过地下电缆连接到导电轨,从而为车载逆变器提供直流母线电压。地面控制室集直流电源控制和机车运行控制、机车运行状态显示于一体,在运行轨道上安装有8 个接近开关,主控程序根据接近开关给的机车位置信息通过无线模块发送控制指令,从而实现对机车的无线遥控控制。轨道线包含导电轨和机车运行轨道,轨道线为设有弯道、坡道的 200 m 环线; 试验机车由大功率直线感应电动机驱动,电机初级线圈在机车上,次级板铺在导轨中间,具体如图1 所示。车载逆变控制器通过无线通信模块实现车载控制器和地面控制室之间的控制指令接收和机车运行状态信息回传。
2 基于 SVPWM 的 VVVF 控制
2. 1 SVPWM 基本原理
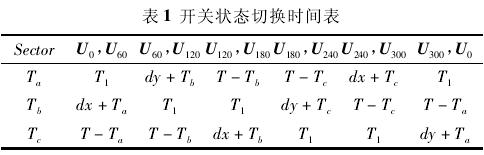
SVPWM 是一种特殊的开关组合控制技术,它将逆变器和电机看成一个整体,基于空间电压矢量的概念,以三相电源产生的磁链为基准,通过控制逆变器开关状态产生所需要的 PWM 波形,从而达到控制电机磁链矢量幅值近似恒定、顶点沿圆形轨迹以电压频率对应的角速度旋转的目的,从而实现对电机的变压变频控制。跟 SPWM 调制相比,SVPWM 调制具有谐波少、电压利用率高的优点[10-11]。逆变电路拓扑图如图2 所示,空间电压矢量及开关状态图如图 3 所示。
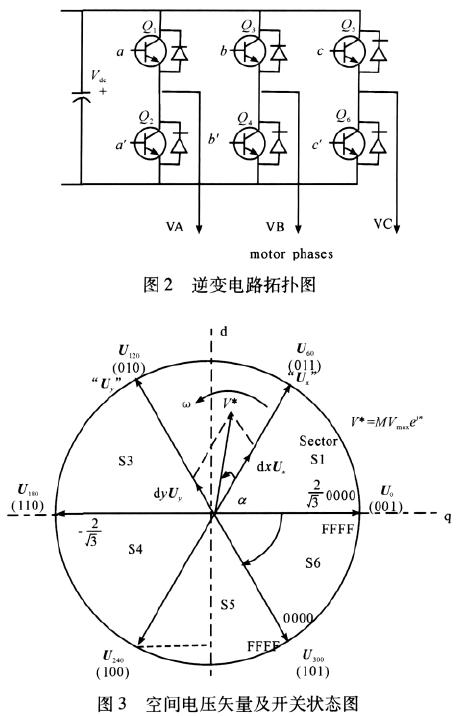
逆变电路 6 个开关共有 8 种允许的开关状态,这8 种开关状态产生 6 个有效电压矢量和 2 个零电压矢量。SVPWM 把每一个扇区分成若干个对应于开关周期的小区间,在每个小区间,用所在扇区的有效电压矢量 Ux、Uy和零电压矢量( U0或者 U7) 的线性组合来合成参考电压矢量 V*,有:
V*= MVmaxejα= Uxdx + Uydy + Uzdz ( 1)
式中: M —调制度; Vmax—相电压最大值; Uz—零电压矢量; 时间做归一化处理,开关周期为 1; dx,dy,dz—对应电压矢量作用时间,且 dx + dy + dz =1。
本研究把参考电压矢量投影到所在扇区的两个有效电压矢量方向,则有:
MVmaxcosα = dx | Ux| + dy | Uy| cos60°
MVmaxsinα = dy | Uy| sin60° ( 2)
式中: α —参考电压矢量 V*和有效电压矢量 U
x的夹角。电压幅值进行归一化处理: 线电压最大值为 V
dc,以相电压最大值为基值

,则有 V
max= 1,| U
x|=| U
y| =

,根据式( 2) 可得:
dx = Msin( 60 - α)
dy = Msinα ( 3)
根据式( 3) 可以算出电压矢量 Ux、Uy在每个调制周期中的作用时间,由于角度 α 为扇区中参考电压矢量与有效电压矢量 Ux间的夹角,式( 3) 适用于任意扇区。
在得到 dx、dy 后,若定义:
结合 DSP 中 PWM 发生电路,可得到各扇区中的开关状态切换时间如表 1 所示。
2. 2 VVVF 控制的实现
该控制系统采用 TI 公司的 TMS320F2812 作为控制器,采用三菱公司的 IPM 模块 PM600CLA060 作为逆变电路,以 2812 为核心的控制器产生的 PWM 信号驱动逆变电路工作。PWM 频率为 5 kHz,死区时间设置为4. 69 μs。通过斜坡函数来给定速度,由于电机出力限制,启动加速度设计为 0. 5 m/s2~ 0. 75 m / s2。牵引直线电机由两台直线感应电机串联而成,该直线电机的极距为 225 mm,牵引直线电机运行时的 V-f 曲线如图 4 所示: 运行最低点频率为 2. 5 Hz,对应电压为80 V; 启动点电压频率设置在 4 Hz,对应电压为102 V;正常运行点电压频率为 10 Hz,对应的电压为191 V;受轨道线限制,运行最高点频率设置为 14 Hz,对应电压是 250 V。
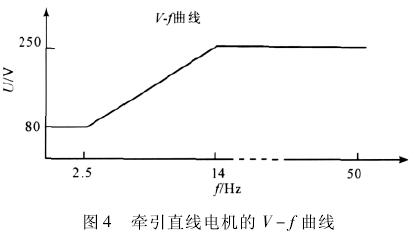
本研究给定速度,经斜坡函数控制得到需要的速度值,即得到了想要的逆变输出电压频率,根据设定的V - f 曲线可以得到对应的电压值,从而确定调制度;根据 PWM 载波频率和运行电压频率可以求得调制比,从而求得每一载波周期对应的电角度,DSP 产生符合要求的 PWM 调制波控制逆变电路产生对应频率、幅值的逆变输出电压。
3 实验结果及分析
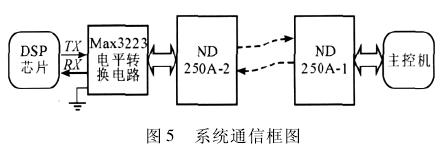
在该试验线中控制器放置在机车上,主控机放在地面控制室里,主控机和控制器之间通过两个无线数传电台进行信息交换,如图5 所示。与主控机相连的无线数传电台 ND250A-1 把控制指令发送出去,与车载控制器相连的无线数传电台 ND250A-2 接收到控制指令后通过 DSP 的 SCI 异步串口把控制指令传到 DSP 中; DSP向主控机回送检测到的电压、电流、速度等信息。
运行控制: 安装在轨道上的接近开关把检测到的机车位置传到主控制室中的上位机,上位机根据机车的不同位置通过主控室的无线通信模块给车载无线通信模块发送不同的控制指令( 启动、上坡、下坡、停止) ,车载 DSP 控制器读取车载无线通信模块接收到的控制指令后改变程序中的相关控制变量,从而产生不同的 PWM 调制波控制逆变电路输出,进而实现机车环线平稳运行: 水平轨道上运行时,机车运行在10 Hz的电源频率下,同步速为 4. 5 m / s; 上坡运行时,为了增大驱动力,机车运行在 12 Hz 的电源频率下,同步速为 5. 4 m/s; 下坡时,由于试验线坡道和弯道限制,为防止机车由于惯性驶出轨道,机车运行在反向 4Hz 的电源频率下,同步速为 - 1. 8 m / s。
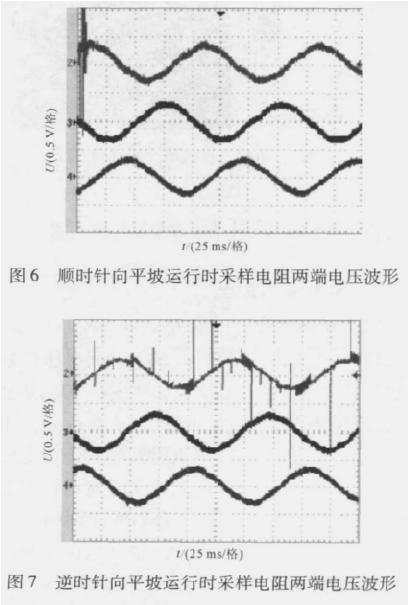
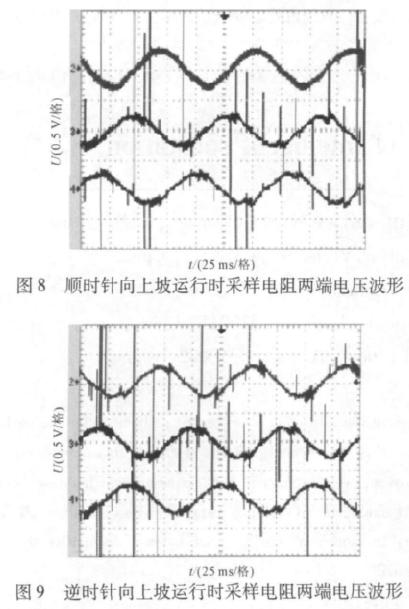
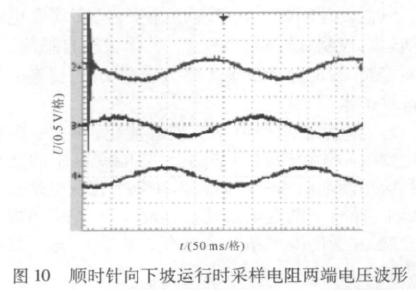
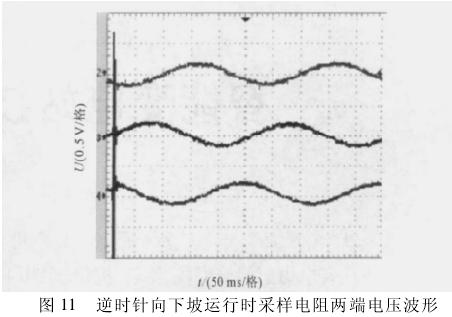
根据以上工况,本研究编制了开环 VVVF 控制程序,为测试控制程序是否能实现机车在轨道线上运行时的各种工况,在实验室中用一台交流感应电机模拟试验线上的直线感应电机,通过人为给定位置信号代替接近开关信号,在实验室中进行了正、反向模拟测试。测试电机参数为: 工作频率为 50 Hz,额定电压380 V,额定电流 0. 5 A,额定功率 180 W。为了便于测试,本研究在交流感应电机三相中串联了 3 个阻值相同的采样电阻,交流电机 A、B、C 三相采样电阻两端电压波形如图 6 ~11 所示,其中图 6、8、10 为顺时针向环线运行时的电压波形,图 7、9、11 为逆时针向环线运行时的电压波形。图6 和图7( 或者图8 和图9) 相比,电压相序改变,对应的电机磁场运行方向改变,从而改变电机运行方向。图6 和图8( 或者图7 和图9) 相比,电源频率由 10 Hz 变成12 Hz,对应电机磁场运行速度增大,实验中观察到电机运行速度增大。图 10 和图 6、8( 或者图 11 和图 7、9) 相比,电源频率变为 4 Hz,电压相序改变,实验中观察到电机反向低速运行[12-13]。
4 结束语
直线电机驱动的地铁与传统旋转电机驱动的地铁相比,优点突出,在我国已经得到很好的应用。为进一步推广、应用直线电机地铁,本研究介绍了一条自主设计的轨道交通试验线,本研究针对试验线工况设计了一套基于 SVPWM 调制的控制系统,采用无线遥控控制在实验室中对机车环线稳定运行进行了模拟测试。测试结果表明该套控制系统能够稳定的工作,可以实现机车在轨道线上运行时的各种工况,这为下一步在试验线上进行试验、调试提供了依据。
参考文献(References):
[1] 叶云岳 . 直线电机原理与应用[M]. 北京: 机械工业出版社,2001.
[2] 杜玉梅,金能强 . 轨道交通用大功率直线感应电动机的设计及特性计算[J]. 微特电机,2009( 12) : 22 -25.
[3] 卢琴芬,方攸同,叶云岳 . 大气隙直线感应电机的力特性分析[J]. 中国电机工程学报,2005,25 ( 21) :132 -136.
[4] YAN L. The linear motor powered transportation develop-ment and application in China[J]. Proceedings of theIEEE,2009,97( 11) : 1872-1880.
[5] THORNTON R,THOMPSON M T,PERREAULT B M,et al. Linear motor powered transportation[J]. Proceedings of the IEEE,2009,97( 11) : 1754-1757.
[6] 范瑜,李国国,吕栋 . 直线电机及其在城市轨道交通中的应用[J]. 都市快轨交通,2001,19( 1) : 1-6.
[7] 杨中平,柳拥军,单雷 . 日本直线感应电机地铁车辆技术[J]. 都市快轨交通,2006,24( 2) : 63-67.
[8] 彭金水 . 直线电机牵引方式在城轨交通选线中的优势[J]. 都市快轨交通,2006,19( 1) : 56-58.
[9] 张敬明,张安 . 广州地铁 4/5 号线直线电机车辆简介[J]. 四机科技,2003( 1) : 1-2,14.
[10] Texas Instruments. Digital Motor Control Software Library spru485a[M]. Texas Instruments,2003.
[11] 陈伯时 . 电力拖动自动控制系统[M]. 北京: 机械工业出版社,2007.
[12] 颜晓河 . 全电动式注塑机计量位置之不理控制电机的选择[J]. 轻工机械,2010,28( 4) : 103-104.
[13] 林高翔,周 箭,陈隆道. 基于 LabVIEW 的网络型电机测试系统[J]. 轻工机械,2010,28( 3) : 73-77.
























 京公网安备 11010202007575号
京公网安备 11010202007575号