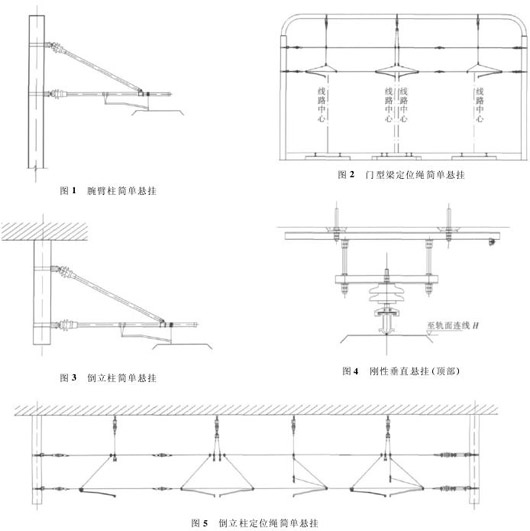
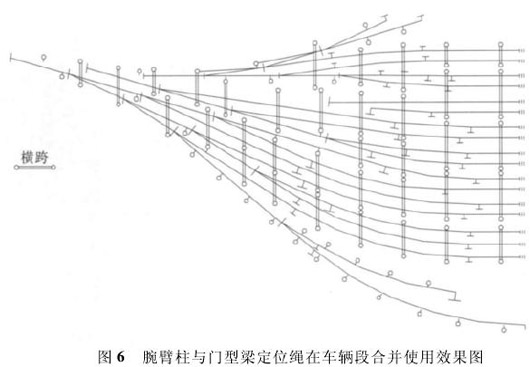
这种根据净空值可以调整的悬挂方案,将地面立杆和顶板悬挂结合起来,既发挥了支柱便于下锚、适应高净空的优势,也体现了顶板悬挂节约投资、美观性好的特点,美观性与投资都控制在最优程度,资源得到最优化配置。
参考文献:
[1] 赵印军. 京沪高速接触网悬挂类型的选择分析[J]. 铁道工程学报,2003( 2) : 100 -103.
Zhao Yinjun. Analysis of Selection of Suspension Type of Catenary Line of Beijing - Shanghai High Speed Railway Line [J]. Journal of Railway Engineering Society,2003( 2) : 100 - 103.
[2] 马沂文,白秀梅. 城市轨道交通供电接触网类型的比较[J]. 城市轨道交通研究,2003( 1) : 20 -24.
Ma Yiwen,Ba Xiumei. A Comparison of UMT Electric Contact Systems[J]. Urban Mass Transit,2003 ( 1 ) : 20 - 24.
[3] 赖声钢. 刚性接触悬挂在运行中的常见问题及分析处理[J]. 都市快轨交通,2004( 2) : 46 -48.
Lai Shenggang. Frequently Met Questions and Treatment Methods for the Rigid Overhead Catenary System in Metro Operation [J]. Urban Rapin Rail Transit,2004( 2) : 46 - 48.
[4] 傅俊武. 刚性与柔性接触网若干功能差异及标准的探论[J]. 电气化铁道,2007( 6) : 41 -42.
Fu Junwu. Differences in Functions of Flexible and Rigid Suspension OCS and Their Parameters [J].Electric Railway,2007( 6) : 41 - 42.
[5] 刘峰涛. 刚性接触网悬吊结构的等效模型[J]. 电气化铁道,2009( 1) : 28 -32.
Liu Fengtao. The Equivalent Model of Suspension Structure For Rigid Suspension Catenary[J]. Electric Railway,2009( 1) : 28 - 32.
[6] 邓强. 城市轨道交通刚性接触网[J]. 都市快轨交通,2006( 5) : 89 - 91.
Deng Qiang. Rigid Conductor System of Urban Rail Transit[J]. Urban Rapid Rail Transit,2006( 5) : 89 -91.
[7] 马沂文. 地铁牵引供电的刚性接触网[J]. 电气化铁道,2002( 4) : 38 - 40.
Ma Yiwen. Rigid OCS for Traction Power Supply System of Subway[J]. Electric Raileay,2002 ( 4) : 38 -40.
[8] 张明锐. 上海市轨道交通供电系统现状分析[J]. 城市轨道交通研究,2004( 2) : 49 -50.
Zhang Mingrui. Power Supply Network of Shanghai Rail Transit[J]. Urban Mass Transit,2004 ( 2) : 49 -50.
[9] 马金芳. 广州地铁直流 1500V 牵引网运营综合分析[J].都市快轨交通,2010( 1) : 21 -24.
Ma Jinfang. Comprehensive Analysis on the Performance of 1500V DC Traction Network in Guangzhou Metro[J]. Urban Rapid Rail Transit,2010( 1) : 21 -24.
[10] 高春宏,屈海洋. 城市轨道交通车辆总体设计研究[J].城市轨道交通研究,2009( 11) : 44 -48.
Gao Chunhong,Qu Haiyang. Overall Design for Urban Rail Trasit Vehicle [J]. Urban Mass Transit,2009( 11) : 44 -48.























 京公网安备 11010202007575号
京公网安备 11010202007575号