地铁2号线信号系统投入CBTC 运营分析
摘 要:西安地铁 2 号线信号系统采用完整的、基于无线通信技术的、移动闭塞制式的 CBTC 列车自动控制系统。结合西安地铁 2 号线具体情况,重点描述了 CBTC 系统运营过程中需要解决的灯泡线自动换端、筛选、精确停车等问题。
关键词:地铁; 信号; 灯泡线; 筛选; 驾驶模式
西安地铁 2 号线信号系统采用完整的、基于无线通信技术的、移动闭塞制式的 CBTC 列车自动控制系统,包括列车自动监控( ATS) 、列车自动防护( ATP) 、计算机联锁( CBI) 、列车自动运行( ATO) 四个子系统。各子系统协调运作,共同实现列车自动运行、列车自动追踪、列车自动折返、列车自动调整等功能。列车折返后自动换端功能的实现对提高CBTC 系统的高效性及先进性有很重要的意义。在列车投入 CBTC 运营前,需进行列车定位与筛选,这对确保列车 CBTC 运行的安全性及实现列车精确停车是非常重要的,本文就自动换端及列车投入CBTC 运营过程中出现的问题谈谈西安地铁 2 号线中的解决方案,并对列车投入 CBTC 运营的过程进行了分析。
1 灯泡线的换端问题
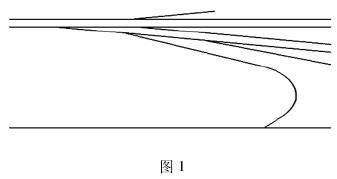
西安地铁 2 号线车辆段线路布置存在三角线路( 如图 1 所示) ,称灯泡线。
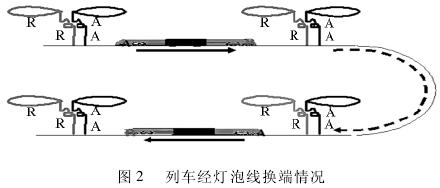
西安地铁 2 号线信号系统车地通信系统采用 A网、B 网冗余配置方案,A 网、B 网同时工作,轨旁AP 天线方向在整个线路固定设置,列车头尾对应轨旁的无线 A 网、B 网固定配置天线,车载的 A 网天线只能与轨旁 A 网的 AP 天线进行通信,车载的 B网只能与轨旁 B 网的 AP 天线进行通信。
当列车通过“灯泡线”掉头驶入另一方向线路时,将出现车头车载 B 网天线对应轨旁的无线 A 网的 AP 天线、车尾车载 A 网天线对应于轨旁的无线B 网 AP 的天线,导致不能正常通信( 如图 2 所示) 。为实现正常的车地通信,需要手工对车头、车尾的车载单元的 A/B 网进行调换,不能实现自动换端,从而影响运行效率。
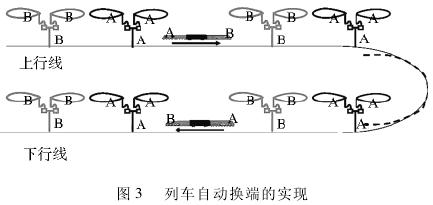
为解决经灯泡线列车自动换端后仍能进行正常的车地通信,西安地铁 2 号线采用针对车头车尾设置 4 个 AP 天线的方案,如图 3 所示,有效解决了灯泡线的自动换端问题。
2 列车的定位与精确停车
列车从车辆段以人工驾驶方式行驶到转换轨( 车辆段与正线连接轨) 后,须先进行定位与筛选才能转换到 CBTC 驾驶模式,也就是从非通信( 指车地通信) 列车转换到通信列车。定位的目的是给轮径校准提供 准确数据进行轮径补偿以确保精确停车。
列车的定位是轨旁区域控制器通过定位信标来实现的。
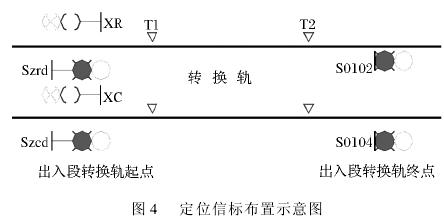
西安地铁2 号线在转换轨处设置有用于定位的信标( 如图4 所示) ,列车经过此区域,车载信标天线读取到 T1、T2 信标,将此二者之间距离与列车通过速度传感器计算所得的结果进行比较,从而计算出轮径补偿的数据,将列车位置误差纠正到规定范围。
为了达到精确停车,信标安放在站台的开始和末尾以及站台中间多处位置。在容易发生空转/打滑的区域,或者在弯道上,信标会相应的布置多一些以减少位置误差。
精确停车的保证是一个比较移动授权和当前列车位置和速度的逻辑功能。
列车读取信标信息确定列车当前的位置,将此信息与列车此时的速度( 通过列车速度传感器测得) 一同发送给轨旁区域控制器 ZC。信号系统接收到停车指令后,ZC 实时将目标停车位置与列车当前位置和速度进行计算,从而得出列车运行的速度曲线并实时发送给列车,最终保证列车停稳在目标位置。
3 列车的筛选
筛选的目的是检查是否有非通信车位于列车的前后,确保列车前后没有影子车( 正常列车前后“隐藏的”非通信车) ,从而实现列车自动追踪。
列车的筛选是轨旁区域控制器利用筛选信标与计轴占用配合来实现的。
筛选检查分为两步: 第一步过程是确定在通信车前是否有非通信车。通信车的车头与下一个计轴区间的距离小于线上列车的最小可能长度,并且通信车前方的计轴区段保持空闲,则确定没有“隐藏的”非通信车处于通信车前方。第二步过程是确定在通信车后是否有非通信车。当一辆通信车经过计轴后,原来的计轴区间变成空闲。如果通信车的尾部和前一个已经通过的计轴闭塞区间之间的距离小于在线最小可能的车辆,且计轴闭塞区间变为空闲,即确认没有“隐藏的”非通信车在后面。
具体筛选示意如图 5 所示: 在转换轨处放置计轴点 A1、A2,并在每个计轴点前设置静态信标用作筛选。
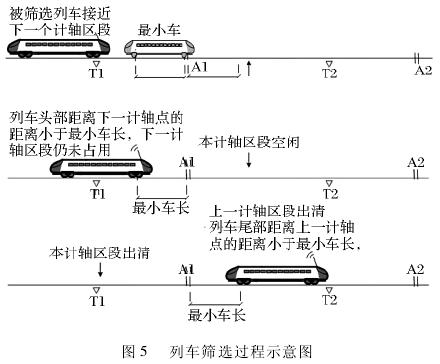
列车以一定的速度通过筛选区,区域控制器根据列车读取到的 T1 信标信息计算列车的位置接近计轴 A1 的位置小于可能出现的最小车长,根据此时计轴区段的占用情况进行分析,若 A1 前方区段未占用,则可判断列车前方没有隐藏影子车。
列车继续前行,区域控制器计算列车的位置出清计轴 A1 后方区段的位置小于可能出现的最小车长,根据此时计轴区段的占用情况进行比较,若 A1后方区段确实已出清,则可判断列车后方没有隐藏影子车。
如果列车在 T1、A1 处筛选不成功,则列车在T2、A2 处重新进行筛选。
4 列车控制模式
西安地铁 2 号线 CBTC 系统具备三个控制等级六种驾驶模式。
三个控制等级即 CBTC 控制级、点式 ATP 控制级及联锁控制级。
CBTC 控制级: 系统提供最高等级的系统操作和性能,各子系统完备并工作,提供移动闭塞安全列车间隔和保护,全功能的车载 ATP/ATO。此控制级别下,列车以 AM 和 ATPM 驾驶模式运行,折返时以ATB 驾驶模式运行。
点式 ATP 控制级: 提供降级的系统操作和性能,根据预先设定的最大限速进行双方向的车载超速防护、信号灯冒进防护和保障 240s 的运行间隔。此控制级别提供单一的操作模式,即 iATP 驾驶模式。
联锁控制级: 提供最低等级的系统操作和性能,仅联锁子系统工作。系统能够提供固定闭塞列车间隔和联锁防护及 25km/hATP 限速防护。允许的驾驶模式为 RM 和 NRM。
六种驾驶模式分述如下:
AM 模式: 列车自动驾驶模式,系统处于全功能使用状态,在 ATS 监控和 ATP 防护下,列车自动驾驶,列车司机或 ATO 子系统开关车门和屏蔽门,发车时,列车司机按发车按钮启动列车的自动驾驶。
ATPM 模式: 有 ATP 防护的人工驾驶模式,在ATP 防护下,列车司机驾驶列车。
iATP 模式: 点式 ATP 驾驶模式,列车司机驾驶列车根据来自信号机处动态信标的信息在 ATP 监督下安全运行,提供强制超速防护功能。
RM 模式: 限制人工驾驶模式,为降级的驾驶模式,列车运行具有最高限速。在这种模式下,列车司机按照轨旁信号显示运行并不能超过最高限速。
NRM 模式: 非限制人工驾驶模式,列车驾驶完全由司机负责。
ATB 模式: 自动折返驾驶模式,在折返操作过程中,CC 负责安全和自动运行。
5 列车以 CBTC 模式投入运营的过程描述
列车投入运营的流程如图 6 所示。
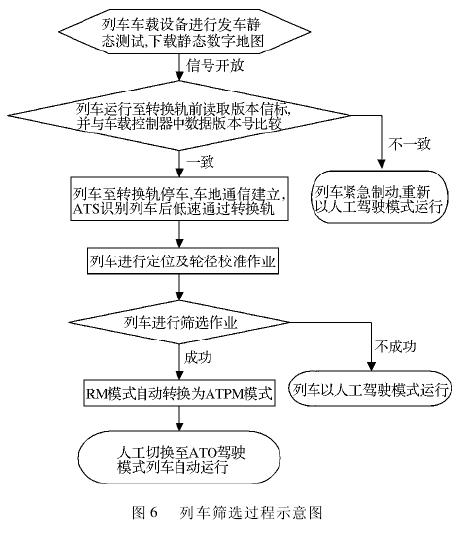
列车从车辆段出发准备投入运营前,司机将会对车载设备进行发车静态测试,如果测试通过,车载设备会从数据库下载当前的“静态数字地图”,此时列车可以投入运营。
相应进路信号开放后,司机以人工驾驶模式驾驶装备有 CBTC 设备的列车向转换轨运行。列车在越过总出段信号机前读取版本信标( 轨道数据库版本号) 信息,与车载控制器中数据库版本号进行比较,确认正在使用的轨道数据库版本与静态信标的轨道数据库版本一致后继续前行至转换轨并停车,列车车载设备与轨旁区域设备建立通信,中央 ATS( 列车自动监控子系统) 或调度员以列车识别号来标识列车。
随着列车以不高于 25km/h 的速度通过转换轨,列车将进行定位作业( 需要说明的是,如果转换轨长度不够长,列车定位也可以在正线完成) 与筛选作业,随后,轨旁区域控制器为列车建立从转换轨至正线终点站的一系列的移动授权。车载控制器从轨旁区域控制器接收到移动授权后,车载控制器会在车载人机界面 TOD 上显示相关信息,并且自动从RM 人工驾驶模式切换至连续式 ATP 防护的人工驾驶模式( ATPM 模式) ,此时司机可将 ATPM 模式切换至 AM 模式,列车以完全的 ATO 模式( 自动驾驶模式) 运行。至此,列车以 CBTC 模式投入运营。
6 结束语
西安地铁 2 号线信号系统各子系统协调运作,列车在经过定位与轮径校准、筛选后投入 CBTC 运营,实现了精确停车、折返自动换端等功能,在各个控制级别下确保了列车运行的安全性,提高了乘客的舒适度,体现了 CBTC 系统的高效性与先进性。
参考文献
[1]GB50157 -2003,地铁设计规范[S].
[2]西安地铁二号线信号系统招投标文件.























 京公网安备 11010202007575号
京公网安备 11010202007575号