从扶梯事故看自动扶梯安全装置的设置
2011 年 6 月,北京地铁 4 号线动物园站 A 口上行电扶梯突然发生倒转,造成电梯上的乘客摔倒、挤压,导致人身伤亡事故。初步调查后,事故的直接原因是由于自动扶梯的驱动主机固定零件损坏,驱动主机发生偏移,驱动链条脱落,造成扶梯下滑。2010 年 12 月深圳地铁也发生过同样事故。
1 标准中要求应该动作的安全保护装置
我国自动扶梯与自动人行道制造安装执行的是 GB 16899—1997 《自动扶梯和自动人行道的制造与安装安全规范》,对于此种危险状态的防护,在 GB 16899—1997 《自动扶梯和自动人行道的制造与安装安全规范》中有第 12. 5 条款中提及的非操纵逆转保护、第12. 6 条款中提及的附加制动器、第 14. 2. 2. 4. 1h 条款中提及的控制驱动装置与转向装置之间的距离 ( 无意性) 缩短装置来对此危险状态进行防护。
2 非操纵逆转保护装置和检查驱动装置与转向装置之间的距离 (无意性) 缩短装置的动作要求及检查方法
对于非操纵逆转保护装置、附加制动器以及检查驱动装置与转向装置之间的距离 ( 无意性)缩短装置的动作在标准中第 14. 2. 2. 4. 1 款要求应使自动扶梯自动停止运行,同时在 GB 16899—1997 第 14. 2. 2. 4. 2 款中要求 “在 14. 2. 2. 4. 1 中e) ~ m) 情况下的开关断开的动作应通过安全触点或安全电路来完成。”,对于安全触点与安全电路这类电气安全装置,其动作在 GB 16899—1997 第14. 1. 2. 4 款中要求 “当电气安全装置动作时,应能防止驱动主机启动或立即使其停止,工作制动器应起作用。电气安全装置应直接作用在控制驱动主机供电的设备上。如果由于传输电力的原因,使用继电接触器来控制驱动主机启动和停止,则它们应作为直接控制驱动主机供电的设备来考虑。”。也就是说,当非操纵逆转保护装置、附加制动器以及检查驱动装置与转向装置之间的距离( 无意性) 缩短装置的动作应使工作制动器工作,同时使驱动主机断电。
对于检查驱动装置与转向装置之间的距离( 无意性) 缩短装置,在检查中需对设置在主机旁的电气开关首先检查其是否满足电气安全装置的要求,然后再进行人为动作开关,观察其是否使工作制动器工作,同时使驱动主机断电。
对于非操纵逆转保护功能的试验,其具体做法是: 首先拆掉电动机的进线,然后给自动扶梯上行信号,这时电动机不工作,但其制动器是打开的,通过盘车装置,向下盘动梯级,此时扶梯或人行道的制动器应立即处于抱合状态,同时使驱动主机断电。
3 附加制动器的特殊要求
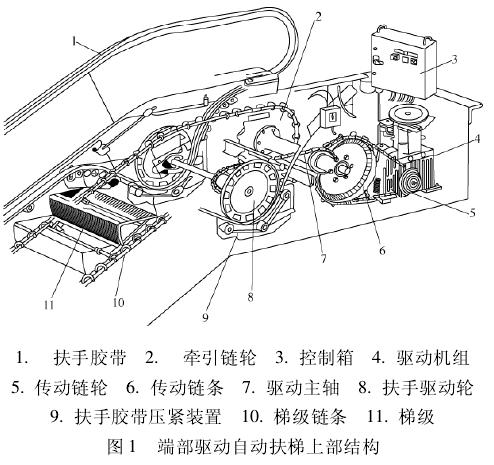
对于附加制动器其设置原则是: 1) 工作制动器和梯级、踏板或胶带驱动轮之间不是用轴、齿轮、多排链条、2 根或 2 根以上的单根链条连接的; 2) 工作制动器不是符合 GB 16899—1997 第12. 4. 2 规定的机—电式制动器; 3) 提升高度超过6 m; 4) 自动扶梯或自动人行道属公共交通型的。同时对于附加制动器标准 GB 16899—1997还要求其作用部位应为: 直接作用于梯级、踏板或胶带驱动系统的非摩擦原件上。这就是说对于用链条来带动梯级、踏板或胶带的,其附加制动器应作用在图 1 中的驱动主轴、牵引链轮、梯级驱动链 ( 当梯级驱动链为单根链条的除外) 。其动作时机为速度超过额定速度的 1. 4 倍之前或梯级、踏板、胶带改变规定运行方向时。当工作制动器与附加制动器同时工作时,其制停距离还应符合 GB 16899—1997 标准第 12. 4. 4. 2 款和第12. 4. 4. 4 款中要求。如果制停距离太小,则 2 制动器动作应采用延时的方法错开,使其制停距离符合相应要求 ( 当速度超过额定速度的 1. 4 倍之前或梯级、踏板、胶带改变规定运行方向这 2 种情况除外) 。
4 不符合要求的附加制动器的设置
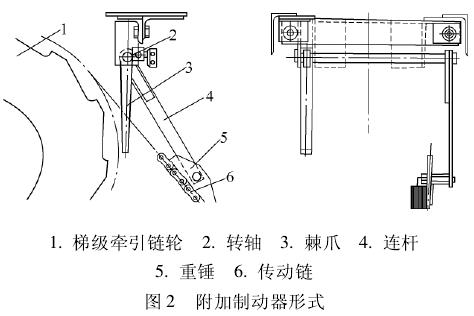
图 2 是某电梯制造厂设置的一种附加制动器的形式,其工作原理是: 重锤平时由重力压在传动链上,棘爪和连杆套在同一轴上,一旦传动链松驰或断裂,重锤在重力的作用下向下摆动,使连杆触动停止开关,该开关属电气安全装置,串于自动扶梯或自动人行道控制系统的安全回路中,由于该开关的动作,从而使制动器工作 ( 处于抱合状态) ,切断电机的供电。同时棘爪通过连杆与轴也顺时针摆动,使棘爪卡入棘轮的凹槽内使棘轮制动。该种保护装置既有电气保护也有机械保护。
这种附加制动器的设计有如下缺陷: 1) 该装置的动作是依赖于驱动装置与梯级牵引链轮之间的传动链的松驰或断裂,未考虑当工作制动器制动力矩不足、扶梯超载、电梯控制系统故障可能导致的速度超过额定速度的 1. 4 倍或梯级、踏板、胶带改变规定运行方向 ( 但传动链未松驰或断裂) ; 2) 该装置的动作是通过棘爪卡入棘轮的凹槽内使棘轮制动,其动作不属于 GB 16899—2007第 12. 6. 3 中规定的机械式 ( 利用摩擦原理) ,它的动作可能会使扶梯的制停距离非常短,同样容易造成乘客倾倒和伤害; 3) 该装置不满足 GB16899—2007 第 12. 6. 5 中提及的: 如果电源发生故障或安全电路失电,允许附加制动器动作的要求 ( 但不一定和工作制动器保持同步动作) 。
对于因为主机与底座的连接螺栓失效导致主机驱动链条与其配合的链轮失去联系,因此,对于这种情况,非操纵逆转保护和检查控制驱动装置与转向装置之间的距离 ( 无意性) 缩短装置的动作,该扶梯也只能使用工作制动器工作和使主机断电。结合图 1 中的情况分析: 当主机驱动机组与驱动主轴、牵引链轮、梯级链条及梯级等梯级传动装置之间已失去联系,工作制动器夹紧动作已不能起任何作用。对于此种情况附加制动器动作与否与动作效果就显得非常重要,它的动作是唯一能使用梯级在这种状况下制停的装置。
5 面临的问题
目前,有不少自动扶梯和自动人行道都未设置检查驱动装置与转向装置之间的距离 ( 无意性)缩短装置,不少相关单位专业人员把梯级驱动链的断裂或过分伸长的保护与驱动装置与转向装置之间距离 ( 无意性) 缩短保护混为一谈,认为梯级驱动链的断裂或过分伸长的保护可代替上述 2种保护,通过文中的叙述两者表述的是截然不同的概念。
对于附加制动器的情况,目前还有使用单位在设备选型时没有根据其运行的工况,对照 GB16899—1997 中第 3. 9 款中对公共交通型自动扶梯或自动人行道的解释的要求进行合理的选型,导致应配置的安全保护装置在设备中未配置。同时还有不少电梯维护保养单位没有严格执行 TSGT5001—2009 《电梯使用管理与维护与维护保养规则》要求对相应部位进行维护。在检查中经常会发现设置附加制动器由于长期不动作,油污严重,导致其制动性能远达不到要求 ( 即应能使具有制动载荷的自动扶梯或自动人行道有效地减速停止下来,并使其保持静止状态) ,虽然在 GB 16899—1997 中对附加制动器的制停距离未作规定。
因此,作为生产单位在为使用单位提供设备时,要为其做好参考,为使用单位提供符合其运行工况的设备。安装维保作为制造的延续,应严格按照安全技术规范的要求,对设备进行安装调试及维护保养工作,确保设备的安全运行。
参考文献
[1] GB 16899—1997 自动扶梯和自动人行道的制造与安装安全规范[S].
[2] 毛怀新 . 电梯与自动扶梯技术检验[M]. 北京: 学苑出版社,2010.























 京公网安备 11010202007575号
京公网安备 11010202007575号