轨道交通地下高精度平面控制网的建立
摘 要: 通过深入分析城市轨道交通工程地下隧道的结构与施工特点,研究建立一套适合现行测量规范的地下隧道高精度平面控制网,并通过较详实的精度分析,说明该网可代替传统的控制基标,直接用于加密基标的测设,达到指导隧道内轨道铺设精细化施工的目标。最后指出,在继承传统基础上进行技术创新对城市轨道交通行业发展的迫切性和重大战略意义。
关键词: 地铁; 隧道; 轨道铺设; 控制基标; CPIII 网; 导线网; 自由设站; 方位角闭合差; 点位相对精度
一、前 言
我国高铁测量技术在引进国外技术的基础上,经过 10 多年的自主创新,已经建立了一套比较完善的控制网布设和施工测量体系,特别是在轨道控制网( CPIII 网) 的建设和使用上,引起了测量界的广泛关注。高铁轨道设标网( CPIII 网) 是在其上级控制网 CPII 或 CPI 基础上建立起来的、直接用于高速铁路轨道铺设的高精度控制网,它与城市轨道交通工程的一个显著区别就是可直接用它进行加密基标测设和轨道板精调,舍弃了中间环节———控制基标的测设( 道岔区仍需测设,本文仅讨论线路正线) 。要达到这一目标,高铁是通过保证 CPIII 网的平面相对高精度来实现的。那么,城市轨道交通工程( 以下简称地铁) 测量能否借鉴高铁思想,建立一套适合地铁建设特点的高精度控制网,实现直接测设加密基标,以达到精细指导轨道铺设的目的呢?笔者带着这样的疑问,经过深入研究,证明在地铁隧道贯通后,建立一套这样的地下高精度平面控制网是可以实现的。
本文首先分析 CPIII 网在网形上无法满足地铁隧道建网的原因,然后分析地铁高精度网需达到的平面精度,在此基础上提出建网方案,并详细分析该网观测后可以达到的精度,最后得出一些重要的结论。
二、高铁 CPIII 网引入地铁隧道所面临的问题
高铁 CPIII 网有两种成熟网形,本文暂称 CPIII标准网和 CPIII 改进网( 如图 1、图 2 所示) ,分别适用于宽阔环境和狭窄环境。有专业人士提出将CPIII 改进网引入地铁隧道施工的建议。
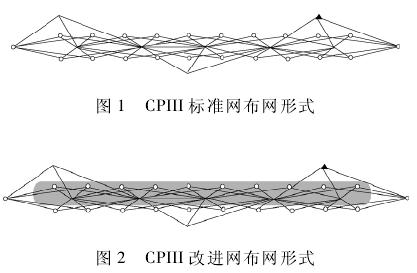
笔者认为,CPIII 改进网用于地铁隧道建网将遇到如下问题:
1) 通视困难,观测难以实现。高铁线路两侧每对 CPIII 点横距在10 m 以上,即使单线隧道,也能达到 8 ~9 m[3]。而北京地区的单线隧道,最大内径多数为 5. 4 m,比高铁缩小近一半,即使采用改进网形,自由设站由于位于隧道中线附近,观测侧壁CPIII 点也十分困难。
2) 外业观测工作量较大。CPIII 改进网形的设站间隔和 CPIII 控制点纵向间距一样,都是 60 m。每个自由设站点观测至少 8 个边长、8 个方向。因此,不考虑与高级点的联测,每千米隧道 CPIII 网至少要设站16.7 个,观测边长133 个,观测方向133 个。
3) 无法配合施工,与施工方的技术条件不匹配。地铁隧道在贯通之前,隧道施工单位多采用导线法指导隧道的定向和开挖,如果采用 CPIII 网布设轨道控制网,就无法充分利用施工单位布设的导线,也不能及时对该导线网进行检测,也就达不到指导施工的目的。
4) 无法满足与高级点联测的要求。高铁轨道控制网 CPIII 要求每隔 600 ~800 m 要与高级点 CPII或 CPI 进行联测,这就要求地铁隧道每隔600 ~800 m设置一个区间竖井,而地铁区间隧道较难满足这一要求; 位于隧道内的高级控制点,目前也只能采用导线测量的方式进行传递。这些都是制约 CPIII 网布设的瓶颈。
5) 精度要求偏高。高铁 CPIII 网要求[2]相邻60 m 点的相对点位中误差在 ± 1 mm 以内,这个要求是为保证高铁高平顺性而提出的,对地铁铺轨来说是否偏高,值得进一步商榷。
三、适用于地铁工程的高精度平面控制网的建立
地铁地下隧道高精度控制网,应建立在以“车站—区间—车站”( 两站一区间) 为固定单元的基础上,在区间隧道贯通后再进行统一观测和整体严密平差处理。该网的起算点,仍为区间两端用常规联系测量方式传递到车站底板的平面控制点。
1. 隧道内控制网点间距的确定
建立高精度平面控制网的目的是为适应地铁铺轨规范要求,达到直接指导加密基标测设的目标,因此需建立合适的控制点间距。《城市轨道交通工程测量规范》( GB 50308—2008)[1]规定,地铁正线轨道铺设控制基标直线段间隔为 120 m,曲线段除曲线要素外,间隔为 60 m; 加密基标直线段间距为 6 m,曲线地段间距为 5 m。因此,高精度平面控制网控制点纵向间隔取和 CPIII 网相一致的60 m,既可满足直线段、曲线段测设加密基标需要,又能满足曲线地段控制点间的通视要求。
2. 点位相对精度要求
《城市轨道交通工程测量规范》( GB 50308—2008)[1]规定,按连续 3 个控制基标推算的折角计算横向相对偏差应控制在 2 mm 以内。因此,按照误差传播律,容易推得( 按控制基标间距 120 m 计算) 建立的高精度平面控制网纵向相邻点( 间距60 m) 相对点位中误差应在 ± 1. 4 mm 以内。此分析也说明,按 CPIII 网相对点位中误差 ±1 mm 来建立地铁铺轨控制网,精度要求偏高。
3. 适用于地铁隧道的地下高精度平面控制网网形
经过反复推敲,建立如图 3 所示的平面控制网作为地铁隧道高精度平面控制网。笔者将其命名为“附加测站极坐标观测及自由设站观测的附合导线网”。该网由骨架附合导线点和侧帮强制对中观测点两部分组成。其中,骨架导线除两段车站作为起算点外,均采用可架设全站仪的强制对中标志;侧帮观测点采用只能安置棱镜的强制对中测杆,只观测方向和距离,不设测站。该网观测数据可划分为 3 部分: 第 1 部分是骨架导线观测数据; 第 2 部分是测站极坐标观测数据; 第 3 部分是自由设站点观测数据。这 3 部分数据可以分步独立观测,也可以进行整体统一观测,最后统一整体平差。
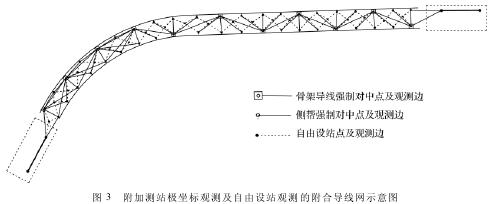
附加测站极坐标和自由设站观测的附合导线网,具有如下鲜明特点:
1) 充分利用施工导线。该网的骨架网可以充分利用贯通前施工单位布设在隧道两侧的强制对中标志,节约一部分埋点费用。控制网的观测成果,包含了导线坐标数据,可作为施工导线检测成果。
2) 充分利用隧道狭窄空间。利用侧帮设置的骨架导线点,按极坐标方式进行侧帮其他点边长、方向( 角度) 观测,比隧道中间设站增强了观测空间。
3) 充分利用强制对中标的优势,增强折角观测,大量减少自由设站观测的工作量。
4) 适当自由设站点设置,增强点位相对精度。自由设站观测设置,目的是弥补单一附合导线极坐标观测的不足,增强观测数据的可靠性,增强带状平面控制网的相关关系,适当提高控制点相对点位精度。
四、精度分析与结论
1. 附合单导线的选取
为使分析结果具有说服力,选取一个具有代表性的工程实例。主要考虑如下因素: 首先,实例应包含直线段和曲线段; 其次,区间长度应适中,不能太短也不能太长; 最后,附合导线观测质量如方位角闭合差、导线全长相对闭合差不能太小,也不能太大。因此,笔者选取刚通车不久的北京某地铁线一段长 1. 8 km 的地下盾构区间,贯通后的附合导线基本满足以上各项要求,只是导线方位角闭合差质量稍高( 限差为 28″,实际为 8″ ) 。该附合导线除两端位于车站内各两个地面控制点外,其余全部为可架设全站仪的隧道侧帮强制对中标志点。导线观测情况如表 1 所示,平差详情如表 2 所示。平差后的点位中误差、相对点位中误差分布如图 4、图 5所示。
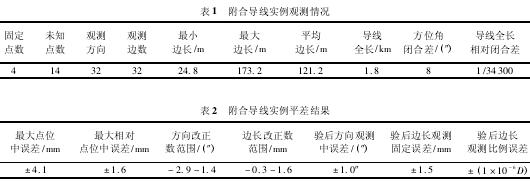
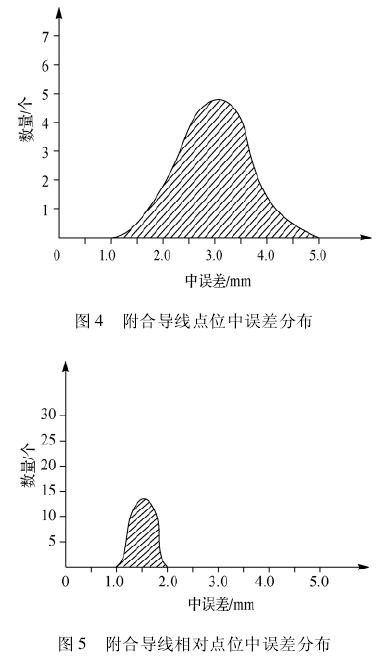
该网虽然观测质量较好,但平差后相邻点相对点位中误差为 ±1. 6 mm,尚不能达到取代控制基标直接用来测设加密基标的要求。
2. 附加测站极坐标导线网精度分析
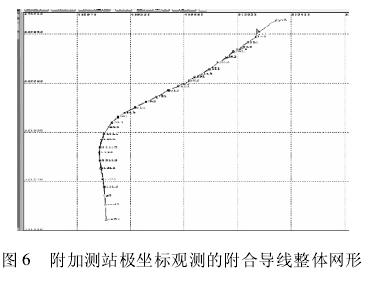
为逐步说明本文提出的高精度平面网的效果,在实际工程实例的基础上,采用增加仿真观测值来进行模拟计算。首先按测角 ± 2″、测距 ± ( 1 mm + 1 ×10- 6D) 精度模拟测站极坐标边角观测值,导线网整体及局部放大形状如图 6、图 7 所示,观测情况如表 3 所示,与实际观测数据结合严密整体平差的结果如表 4 所示。平差后点位中误差、相对点位中误差分布如图 8、图 9 所示。
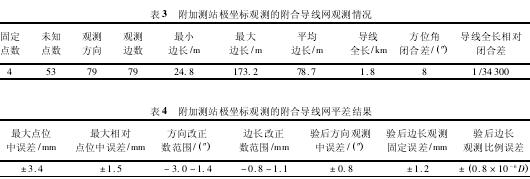
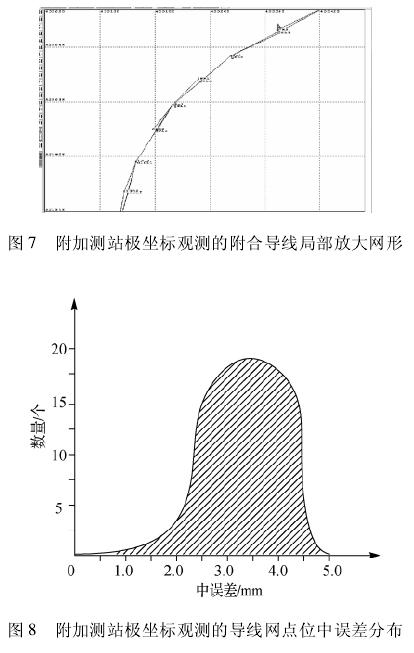
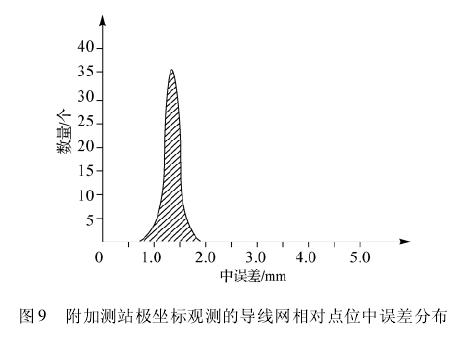
从表 4 中可以发现,附合导线附加测站极坐标观测值后,点位精度有少量提高,但相对点位精度几乎没有变化。
3. 附加自由设站观测后的导线网精度分析
接下来,在前两步工作的基础上,附加自由设站观测,每站观测相邻的 4 个侧帮点。所有附加数据仍采用仿真观测值。此模拟网整体形状如图 10所示,局部放大如图 11 所示,观测情况如表 5 所示,整体平差情况如表 6 所示。平差后的点位中误差及相对点位中误差分布如图 12、图 13 所示。
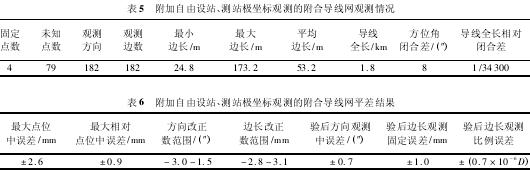
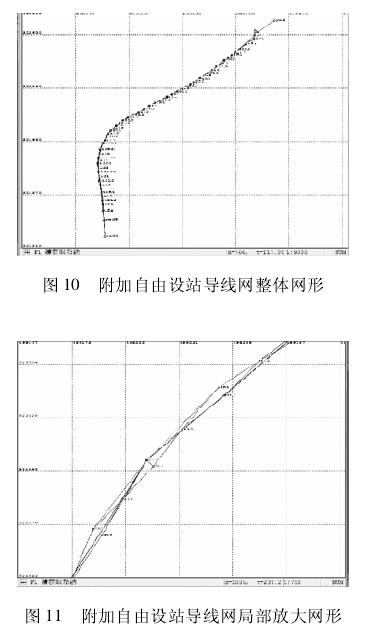
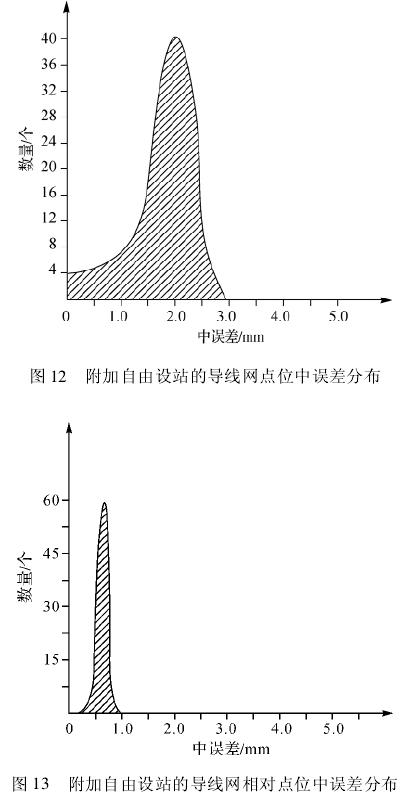
通过对以上各表、图分析可以看出,此时该网点位精度和相对点位精度都有大幅度的提高,其中相对点位中误差已经达到了高铁 ±1 mm 的标准要求。当然亦可满足地铁隧道内直接测放加密基标的要求。
4. 附合导线方位角闭合差问题
本例附合导线方位角闭合差较小,不具一般性。实践表明,很大一部分地铁区间附合导线方位角闭合差难以满足《城市轨道交通工程测量规范》( GB50308—2008)
[1]规定的 5

方位角闭合差( 规范无明确要求,此处暂按精密导线指标套用) 限差要求。那么,在这种超限情况下,附加测站极坐标观测及自由设站观测的附合导线网是否能满足地铁铺轨需要。为回答这个问题,假定该导线短边一端( 边长24.8 m)的后视起算点产生了横向5 mm 的移动,且无法发现,仍旧使用其原坐标成果起算,这样起始方位附加了42″的方位偏差,附合导线闭合差变为 35″,已超过限差值( 28″) 。其余观测值和模拟观测值不变,对这个方位角闭合差超限的网进行整体严密平差。结果表明,控制网点位中误差最大为 ±2. 9 mm,相对点位中误差最大为 ±1.2 mm,仍可满足地铁铺轨施工需要。说明该高精度平面网具有抵御少量粗差的能力。
5. 自由设站观测的简化
对比图 3 和图 2 可以发现,本文提出的高精度平面网与 CPIII 改进网相比,自由设站数相同,外业观测量方向数、边数显著减少。另外从表 6 来看,该网平差后相对点位中误差对地铁施工来说还是比较小。因此,还可适当减少自由设站数,增加每站观测方向和边长数,在满足直接测设加密基标的精度要求前提下,进一步减少外业工作量。
6. 结 论
实例及仿真数据分析说明,笔者提出的附加测站极坐标观测和自由设站观测的附合导线网点位密度选取较合适,外业观测量较高铁 CPIII 网减少约 20%,精度达到现行地铁规范要求,是比较适应地铁工程特点的地下高精度控制网。其建网思想可引申到地铁工程的地面线和高架线。
五、总结与展望
城市轨道交通工程测量较其他土木工程测量来说,虽然测量技术比较成熟,精度较高,但仍存在许多不足的地方。因此,在继承传统的基础上,进行有针对性的技术创新刻不容缓,走精细化施工道路将是行业发展的必然选择。
当前,高铁领域的测量技术经过十多年引进、吸收和再创新,已经走在了地铁的前面,并有了向地铁领域渗透的趋势。但地铁工程具有许多与高铁不同的特点和难点,地铁测量技术的创新,绝不能抛弃业界长期积累的宝贵经验,机械地照搬高铁。
本文提出的地铁地下高精度平面控制网建立的思想,立足于地铁工程自身特点,既继承了传统建网的成功经验,又吸纳了高铁轨道设标网的优点,目的是在地铁测量技术创新方面作个表率,抛砖引玉。希望能够引起业界同仁的广泛关注和高度重视,为推动城市轨道交通工程测量领域的科技进步开创一个百家争鸣、百花齐放、积极探索、争相创新的崭新局面。
参考文献:
[1] 中华人民共和国建设部. GB 50308—2008 城市轨道交通工程测量规范[S]. 北京: 中国建筑工业出版社,2008.
[2] 中华人民共和国铁道部. TB 10601—2009 高速铁路工程测量规范[S]. 北京: 中国铁道出版社,2011
[3] 李向国,黄守刚,张鑫,等. 工作的开始: 高速铁路施工新技术[M]. 北京: 机械工业出版社,2010.
[4] 胡伍生,潘庆林,黄腾. 土木工程施工测量手册[M].2 版. 北京: 人民交通出版社,2011.
[5] 卢建康,刘华. 高速铁路精密工程测量技术体系的建立及特点[J]. 铁道标准设计,2010( Z1) : 70-73.
[6] 董伟东. 国家体育场斜柱 3 维定位模型与测设[J]. 测绘通报,2006( 5) : 33-37.
[7] 秦长利,董伟东. 地铁控制基标归化改正原理及编程实现[J]. 北京测绘,2004( 3) : 1-7.
[8] 马海志,马尧成,陈大勇,等. 地铁隧道横断面测量的三维坐标动态解析法[J]. 北京测绘,2008 ( Z1) :33-36.
[9] 董伟东,任干,马龙. 盾构机激光导向系统原理[J]. 测绘工程,2005,14( 4) : 61-64.
[10] 李德仁. 顾及精度与可靠性的测量控制网优化设计的设想[J]. 测绘学报,1989,18( 4) : 241-248.
[11] 鲍峰,程效军. 带权约束参数平差在工程控制网优化中的应用[J]. 测绘学报,2002,31( Z1) : 73-76.
[12] 马全明. 城市轨道交通工程精密施工测量技术的应用与研究[J]. 测绘通报,2010( 11) : 41-45.























 京公网安备 11010202007575号
京公网安备 11010202007575号