公共建筑行人交通仿真性能分析
摘 要: 公共建筑内的行人交通是一个群聚密度不确定、个体之间相互作用的非线性随机动态问题. 计算机动态仿真是目前研究公共建筑物内行人交通流动力学特性的有效方法之一. 文中针对主流仿真软件在模拟相同场景下行人疏散结果时存在差异的问题,分析仿真软件在模型性能上的差异,解释离散空间引致仿真误差的原因,同时引入保真度来评价仿真模型的精确程度. 通过对比地铁站通道的实验数据和仿真结果,得出行人交通仿真性能与建筑物内环境密切相关的结论,验证保真度对仿真模型的重要性. 案例结果表明,连续矢量空间多智能体仿真模型对再现公共建筑内行人交通的保真度高达 87%.
关键词: 公共建筑; 行人交通; 仿真模型; 保真度
公共建筑属于人群高度聚集的场所,对公共建筑中人群安全疏散的研究具有极大的现实意义和社会安全价值. 公共建筑物内的行人交通是一个群聚密度分布不均匀、个体与个体、个体与环境之间相互作用的非线性随机动态系统. 行人交通流受建筑物空间环境的影响,呈现出低密度自由行走、高密度受限移动甚至停滞等待等多种不同运动形式并存的状态. 尤其是在高密度条件下,要想通过现场观测和实验来捕捉人群动态拥挤和紧急疏散过程的运动规律是非常困难的. 因此,采用行为模型的计算机动态仿真以再现公共建筑物内的行人微观运动情景是目前研究行人交通流动力学特性的有效方法之一.
计算机动态仿真的目的是再现建筑物特定空间下行人微观运动的过程,并对其交通系统性能进行评估. 从目前商业化主流仿真软件的分析结果来看,对相同建筑空间下行人的疏散过程,不同仿真软件预测的行程时间相差达 40% 以上,且预测误差随着系统状态密度的增加而加大[1-4]. 究其原因,首先是大多数仿真软件采用元胞自动机模型( CA) 的离散网格. 元胞空间占有状态“非此即彼”,基本单元的离散化误差使得模型运算累计误差不断增加; 其次是建筑空间模型细化程度与行人运动状态的仿真结果密切相关,任何一个细小环节的缺失都会对群体运动轨迹的偏差产生影响; 再次是元胞的状态更新规则是对个体概率性微观行为的“再现”,而非群体在不同交通环境下系统宏观性能的“表征”,复杂系统难以通过个体微观行为推理出行人交通系统的运动机理和演化趋势; 最后是仿真模型需要经过实验数据的标定和精度确认等检验环节,这是一个比建模更为重要、更为精细的质量保障工作.
因此,计算机仿真模型能否真实、准确地再现行人的实际运动过程,其保真度是一个值得特别关注的性能指标.
文中通过解释离散空间对仿真产生误差的原因,结合实验数据与模型仿真对比结果,说明保真度在行人仿真中的重要性.
1 仿真模型的保真度
计算机仿真模型的保真度通常用平均绝对百分误差( MAPE) 和预测精度准确率( ACCU) 两项性能指标来评价[5].
MAPE 定义为仿真 数值与实 验数值 的相对误差,可用下式进行描述:

式中,X
t为实验值,

为仿真值.
ACCU 定义为仿真数值对真实场景的准确度,可用下式进行描述:

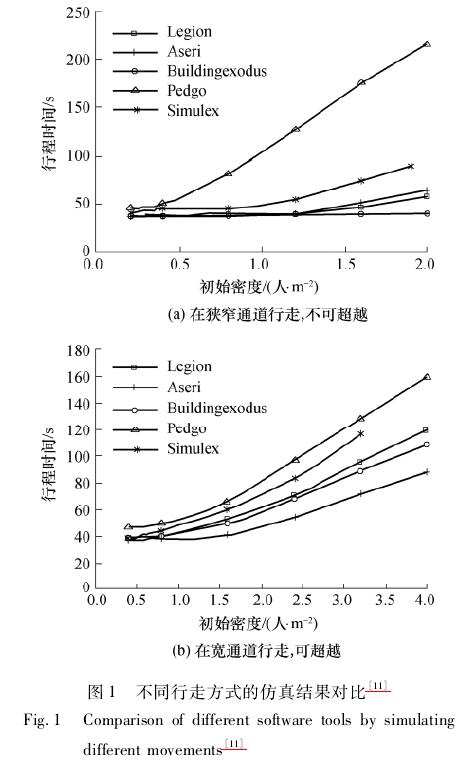
从本质上说,行人仿真是利用计算机强大的运算功能,把在现实生活中不易发生或试验成本较高的场景展现出来. 由于仿真模型大多数是基于常规试验数据建立起来的,具有一定的普适性,但并不适用于某些特殊环境和特殊行为规则的场景,因此仿真效果与现实场景之间的差异成为制约模型优劣的关键因素. 图 1 为当前几种主流行人仿真软件[6-10]对长直走廊场景的仿真结果. 数据表明,当密度高达拥挤状态时,其仿真误差可达4 倍之多[4]. 仿真模型空间不仅影响行人运动状态的真实再现,而且影响行人疏散时间预测的准确性.
2 模型空间分析
行人仿真模型的状态空间主要有宏观流体动力学模型的一维可压缩管状连续体、CA 模型的二维离散空间和人工智能模型的连续矢量空间. 由于行人运动过程中具有高度自主性,因此在行人所表现出来的运动特征为高度离散性. 本节重点讨论模型空间的离散性对仿真模型保真度的影响,尤其在模型空间的利用. 模型中人员的描述、空间的运动约束等方面[12].
2. 1 模型空间的利用
离散空间模型把建筑物空间划分为微小网格,通常取为 0. 4 m ×0. 4 m. 此时仿真空间的状态密度可达 6. 25 人/m2. 然而,从实验观察可知,行人交通是由拥挤行人相互制约的连续群集流和单个行人自由运动的离散粒子流所构成的混杂运动系统,密度随时间、空间以及周边交通环境而变化. 在宽阔广场或畅通走廊里自由行走时,行人的运动空间增大,最大密度只能小于 3 人/m2; 而在高密度拥挤或排队等待区域时,行人不得不承受活动空间的缩小,产生身体的接触甚至挤压,此时人群密度可能高达 8 ~10 人 / m2. 显然,固定尺寸的离散网格无法适应这种密度频繁变化且群聚状态不确定的运动过程,每一步长仿真误差都会人为地造成整个仿真过程的累积误差.
2. 2 模型中人员的描述
基于离散网格的仿真模型是假设模型中的行人占有同样的空间面积. 事实上各地区各季节的行人具有不同的身体基本尺寸,在地铁、火车站、机场等公共交通场所,行人往往随身携带有行李,这类行人的比例较大时,仿真模型不得不考虑增加行人固有的运动空间. 另外,行人的体形还与行人的运动状态( 如速度) 有关,在休息和漫步时,人的形体沿运动方向为扁平椭圆形; 当速度增加时,人的形体随着腿的移动和手臂的摆动而改变为直长椭圆形. 显然,若采用连续矢量空间模型则很容易表现不同个体基本空间大小的行人,只需要通过条件函数实时调整行人运动空间的半径就能达到.
2. 3 空间的运动约束
离散网格模型中,行人的速度受到网格尺寸的限制,不能准确地反映行人的运动状况.
2. 3. 1 步长约束
行人的行走速度随着个人的生理心理条件及周边交通环境的不同有很大的差别. 通常固定尺寸的网格空间无法表现行人个体真实的速度分布. 假定一个格子的大小为 0. 4 m ×0. 4 m,速度只能为网格长度除以时间步长的整数倍,可取值为 0、n × 0. 4/Δt( 水平或垂直方向) 和 n × 0. 57 /Δt( 单位: m/s)( 对角线方向) ,n =1,2,…,7. 这与实际速度分布不符,由此造成了不同的仿真模型误差较大.
2. 3. 2 方向受限
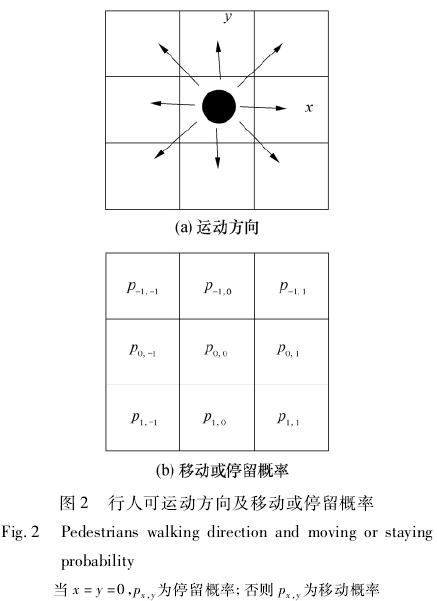
在网格模型中,模拟实体在空间上的移动受到网格排列方式的限制,如图 2 所示元胞自动机模型中,行人的运动方向只能有 8 个,θ = n ×45,n =0,1,…,7[7]. 因此,有限的移动方向无法表现行人微小的方向变化,如为了避让迎面而来的行人所采取的方向性微量偏移.
模型空间的选择和细化决定了行人位置及其移动速度的准确性,直接影响了仿真模型的保真度. 下面通过案例分析,探讨各类行人行为特性在公共建筑结构下的仿真过程,指出保真度是一个衡量仿真模型是否适合于各种复杂结构及特定场景模拟的关键性指标。
3 案例分析
3. 1 案例场景
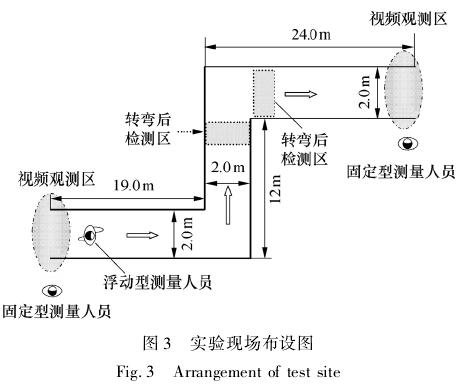
选择公交枢纽站地铁站厅中转换乘通道的晚高峰时段作为案例实景. 实验场地及数据采集布置如图 3 所示. 通道为单向行走,并且通道间没有其他的出入口,也没有任何行人滞留的现象. 行人从入口进入后沿着通道单向行走至出口离开. 在通道出入口观测区各设置一台摄像机,记录行人的运动状态. 测量人员分为浮动型和固定型两类. 浮动型测量人员跟随地铁乘客行进( 只能跟随前面行人的行走速度,不能超越或滞后) ,观察实验过程中人群的聚散状况,记录乘客通过换乘通道的行程时间. 固定型测量人员位于换乘通道出入口记录端口交通状态,同时记录浮动测量人员进入通道时刻 t1到走出通道时刻 t2通道内所有的人数 M.
3. 2 数据处理方法
实验中,可以从 DV 视频中获得入口流量、通道入口处行人速度及密度等相关参数. 实验表明行人交通特性受到通道内行走环境的影响,影响因素主要为通道内行人密度、障碍物( 通道两壁) 和通道结构( 左右转弯) .
3. 2. 1 行程时间的计算
行人在换乘通道内的行程时间以两端固定型人员测量人员观测断面为准,根据调查数据进行相应处理. 浮动测量人员进入通道时刻为 t1,离开通道时刻为 t2,则行程时间为[13]
式中: vi为通道中第 i 段区间的瞬间速度,它与该段区间 Li的平均密度 ki相关。
3. 2. 2 端口密度与通道平均密度的计算
出入端口空间密度是指观测区内单位面积的人数( 单位: 人/m2) ; 而通道平均空间密度为

式中,M 为固定型测量人员位于换乘通道出入口处记录的从浮动测量人员进入通道时刻 t1至走出通道时刻 t2通道内所有的人数,A 为通道面积.
3. 3 保真度分析
文中采用连续矢量空间多智能体仿真模型再现实验场景中复杂的行人运动动态. 以行程时间作为状态变量,对上述公共建筑物通道( 包含直行通道和左右转弯) 的行程时间以实验数据和仿真进行验证. 预测时间的保真度,即仿真模型产生的行程时间误差,分析仿真性能与通道内行人速度分布和密度的关系.
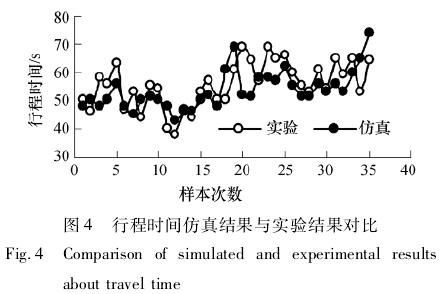
3. 3. 1 实验及仿真行程时间
实验中采用跟踪法观察通道内人群的聚散状况,并记录行人的行程时间. 同时根据实验初始条件和数据,运用仿真软件再现实验的过程,将仿真结果和实验结果作对比分析.
图 4 为计算机仿真和实验测量得到的行程时间对比结果. 从上述行程时间曲线可看出,仿真曲线较为平稳,而实验曲线波动较大,这与实验场景中行人的心理、环境因素相关. 总体上说,该模型的保真度较高,基本上保证了仿真场景的真实性.
3. 3. 2 速度分布
案例场景中的通道是多曲型通道. 行人在转弯处受到通道结构变化的影响,行走路径发生变化,人群向弯道内侧聚集,弯道外侧路径拉长,行人速度发生明显变化. 以右转弯为例,行人速度分布见图 5。
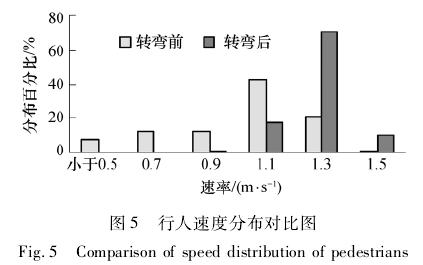
图 5 显示了通道内行人在转弯前后速度的变化,转弯前,行人的速度有多种分布,行人在进入通道、通道内行走和接近转弯处表现出不同的速度. 转弯处行人的速度减小; 转弯后,行人速度分布类型减少,这是因为行人在转弯处速度减小,行人数量增加,转弯后行人的密度增加,大多数行人都跟随自己前面的行人,行人群的速度相似比例提高,同时,由于没有转弯对行人形成的“心理压力”,行人流的速度也有所提高,这与实验观察到的情况吻合. 计算机仿真不仅能给出与实验结果相符的预测结果,而且能动态模拟行人行为,并且解释行人流的基本特性.
3. 3. 3 行程时间与平均密度
场景通道内行人速度与密度相互影响,同时速度也和行程时间相关,与此同时,速度还受到周围环境的制约. 行人交通流特性通过行人速度和密度来反映,因此可通过建立行程时间和行人密度的相互关系来描述案例场景中的行人交通流性能. 根据实验和仿真数据建立的行程时间 - 行人密度曲线如图6 所示.
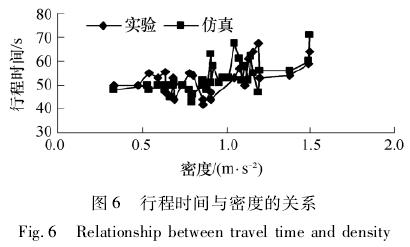
图 6 描述了实验和计算机仿真的行程时间与平均密度的关系. 对比表明: 行人的行程时间随着密度的加大而增加,这意味着随着人员密度的增大,行人的行走速度不得不降低; 同时,实验和仿真结果非常接近,说明该仿真模型的保真度非常高.
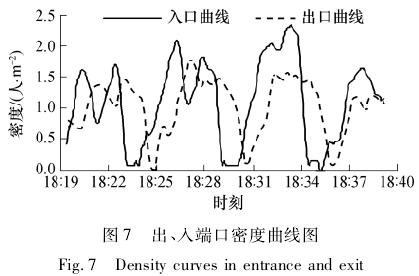
3. 3. 4 端口密度
行人的行走速度受到通道宽度的影响,出入端口空间密度可表现地铁站行人流的特性.
图7 所示入口密度曲线表明,乘客以群体进入,行人流具有明显的群集现象; 出口密度曲线表明,群集现象随着时间向后推移,同时具有逐渐离散的趋势.
综上所述,对行人的行程时间进行 MAPE 值计算,得 MAPE = 10. 603%. 同时,计算 ACCU 值,得ACCU = 87. 676% .
因此,可以根据以上的 MAPE 值和 ACCU 值判断出仿真模型在模拟通道行人行走过程时的误差和准确度. 此两项性能指标对模型校正及模型参数的标定至关重要.
4 结语
文中提出,保真度是一个衡量公共建筑行人仿真“软件”性能的重要指标,实验则是验证行人交通仿真模型最为有效的方法. 软件工具基于不同模型算法模拟相同公共建筑物场景得出不同的仿真结果,离散空间仿真模型不能够把行人流各种特性真实地重现在计算机屏幕上. 案例分析表明,连续矢量空间多智能体仿真模型对再现公共建筑物地铁站通道行人交通的保真度要比离散空间模型高. MAPE与ACCU两项性能指标对模型校正及模型参数的标定至关重要.
另外,虽然目前已经有许多行人运动模型能够通过计算机技术再现行人的行为状态,为大型公共建筑人群疏散研究提供有效方法,但还没有相应的系统评价指标来衡量仿真模型是否适合指定的仿真场景,软件系统所采取的实验数据、计算机技术、行为特性以及心理决策等因素直接影响着仿真结果,这些问题还有待进一步研究.
参考文献:
[1] Blue V J,Adler J L. Bi-directional emergent fundamental pedestrian flows from cellular automata microsimulation[C]∥ Transportation and Traffic Theory: Proceedings of the 14th International Symposium on Transportation and Traffic Theory. Ceder A,ed. Pergamon: [s. n. ],1999:235-254.
[2] Christian Rogsch,Wolfram Klingsch,Armin Seyfried,et al.How reliable are commercial software-tools for evacuation calculation? [C]∥ Interflam 2007-Conference Proceedings Interscience Communication Ltd. Greenwich: [s.n. ],2007: 235-245.
[3] Rogsch C,Seyfried A,Klingsch W. Comparative investigation of the dynamic simulation of foot traffic flow[J]. Pedestrian and Evacuation Dynamics,2007,9 ( 33 ) : 357-362.
[4] Schadschneider A,Klingsch W,Klüpfel H,et al. Evacuation dynamics: empirical results,modeling and applications [J]. Springer,2009,6( 3) : 3142 -3175.
[5] Yu Chuan-su,Tung Ho-lin,Fan Tien-cheng,et al. Accuracy and real-time considerations for implementing various virtual metrology algorithms [J]. IEEE Transactions on Semiconductor Manufacturing,2008,21( 3) : 426-434.
[6] Legion Limited. Legion user manual [R]. London: [s.n. ],2006
[7] IST GmbH. Aseri user guide [R]. Frankfurt: [s. n. ],2007.
[8] Prof Ed Galea FSEG. Buildingexodus user manual [R].Greenwich: [s. n. ],2008.
[9] TraffGo GmbH. Pedgo user manual [R]. Duisburg: [s.n. ],2009.
[10] IES Ltd. Simulex user guide [R]. Scotland: [s. n. ],2007.
[11] Rogsch C,Klingsch W,Seyfried A,et al. Prediction accuracy of evacuation times for high-rise buildings and simple geometries by using different software-tools [J].Springer,2009,9( 42) : 395 -400.
[12] Gianluca Antonini,Michel Bierlaire,Mats Weber. Simulation of pedestrian behavior using a discrete choice model calibrated on actual motion data [M]. [S. l. ]:Signal Processing Institute,2007.
[13] 徐吉谦. 交通工程总论[M]. 北京: 人民交通出版社,2002.























 京公网安备 11010202007575号
京公网安备 11010202007575号