高速磁浮列车悬浮间隙传感器建模方法
由于高速磁浮列车具有快捷、安全、噪音小等优点,世界很多国家都在进行高速磁悬浮列车的研究。近年来我国的高速磁浮列车技术也取得了重大进展,已引进德国技术为主的上海浦东机场至地铁 2 号线龙阳路站全长 30 公里的高速磁悬浮列车示范运营线,宣告了我国磁浮交通的诞生。但示范运营线是上海磁悬浮交通发展有限公司与由德国西门子公司、蒂森快速列车系统公司和磁悬浮国际公司组成的联合体签署的“上海磁悬浮列车项目供货和服务合同”,其核心技术仍然由德方掌握和提供,悬浮系统是高速磁浮列车系统的关键和核心,而间隙传感器又是悬浮系统的重要组成部分,因此,对间隙传感器相关技术的研究,对提高传感器的精度与稳定性、对加快我国高速磁浮交通的发展有着重要的意义。
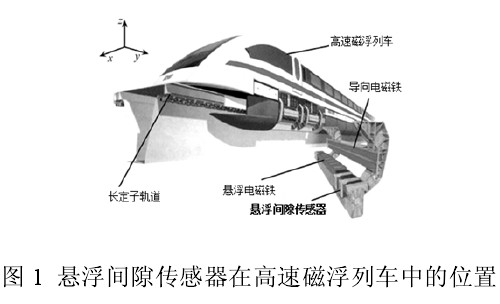
高速磁浮列车间隙传感器常用电感式位移传感器原理检测悬浮电磁铁与轨道表面之间的间隙值,而电感式位移传感器的工作原理决定其输出值与被测间隙值之间并不是线性的,为满足悬浮系统闭环控制的要求,需要对传感器进行非线性校正。如图 1 所示,间隙传感器的检测线圈嵌装在悬浮电磁铁磁极之间,车辆悬浮和运行时,悬浮电磁铁发热大,特别当车辆在静止悬浮状态或低速运行时,由于散热不好,电磁铁的温升较快,它产生的热量将快速传递给悬浮间隙传感器检测线圈和处理电路,若不采取措施,间隙传感器输出信号将出现明显的温度漂移,可能导致悬浮控制系统出现不稳定,所以必须采取措施减少温度漂移,提高传感器输出信号的稳定性。
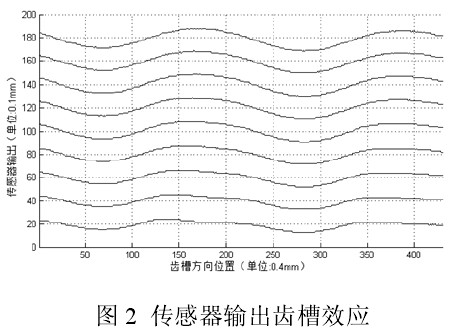
齿槽效应是高速磁浮列车间隙传感器所面临的一个特殊性问题。在高速磁浮列车系统中,轨道长定子为齿槽周期交错的结构,齿宽 43mm,槽宽为 43mm,槽深约为 50mm,间隙传感器线圈嵌套在电磁铁磁极之间。悬浮间隙是指传感器线圈表面与长定子齿面之间的间隙。在相同间隙情况下,由于传感器线圈与长定子轨道之间所处的水平方向位置不同,线圈的等效电感会有所不同,最终导致列车行进中传感器输出有周期性纹波。也就说,即使悬浮间隙传感器与长定子极面之间的间隙保持恒定不变,只要间隙传感器与长定子轨道之间在水平方向上有相对移动,传感器的输出信号并不表现为恒定值,而是如图 2 所示的有与齿槽规律性相关的纹波信号,定义这种与长定子齿槽周期相关的纹波信号为齿槽效应。若无法有效遏制齿槽效应,将导致悬浮系统性能下降,情况严重时会发散振荡。因此研究遏制悬浮传感器齿槽效应的方法具有重要意义。
实际系统中,解决上述问题的途径主要是:1)通过研究新结构、新原理以及改进制造工艺,从硬件的角度进行考虑,但往往比较困难;2)采取软件校正或补偿等措施,但其关键在于如何有效建立传感器的高精度数学模型。因此有必要研究新结构、新原理,并在此基础上建立高精度的数学模型。
近年来,随着人工智能技术的迅猛发展,基于人工智能的建模方法在传感器建模中得到广泛应用。但在高速磁浮列车悬浮间隙传感器的研究中尚未有引入人工智能建模的文献,故有必要将基于人工智能的建模方法引入间隙传感器中进行研究。为满足悬浮系统对传感器的高精度和稳定性要求,有必要对包括神经网络、支持向量机和模糊理论等人工智能方法本身的完善、算法的改进以及各方法之间融合进行研究,对众多智能方法和算法进行对比研究,以确定适合的智能模型。
传感器的非线性校正和温度补偿问题,就是要求传感器的输出,真实反映被测目标参量,消除传感器受非目标参量干扰的影响,解决的方法一方面是:通过研究新结构、新原理和改进制造工艺,以及通过后续测量电路的硬件补偿法。《具有温度补偿的光纤光栅压力传感器》(彭保进等)是从传感器的结构、原理、工艺和特性本身着手,对传统传感器提出改进,实现传感器非线性补偿或温度漂移补偿的。《三角形面插值在电容式型砂水分传感器温度补偿中的应用》(徐冉、傅增明、朱世根)、《数字传感器非线性校正方法研究》(孙鹏)、《DOAS 方法在线测量污染气体浓度的温度与非线性补偿》(邵理堂等)是利用各种方法对传感器后续测量电路进行改进,从而完成非线性补偿和温度漂移补偿的。
另一方面是采用中间补偿和修正措施,该方法的核心是正确描述传感器观测到的数据信息和观测方式、输人输出模型,并确定校正环节,即对传感器进行建模。传感器数学建模的方法很多,总体可划分为两种:传统方法和现代方法。传统上常采用的方法有查表法、函数拟合法、最小二乘法、函数链法等。《基于温度补偿的传感器建模方法及其应用》(唐炜、徐晓苏)采用基于矩形域的乘积型最小二乘曲面拟合方法,建立了传感器的三维关系模型,用于系统的非线性校正和温度补偿。《三角形面插值在电容式型砂水分传感器温度补偿中的应用》把三角形面插值应用到传感器的温度补偿中,取得了较好的效果。《数字传感器非线性校正方法研究》将查表法结合线性插值法,对石英晶体传感器进行非线性补偿,得到了比较好的线性化效果。《DOAS方法在线测量污染气体浓度的温度与非线性补偿》采用对温度和非线性函数进行多项式拟合,实现温度和非线性补偿。《Z-温度传感器的非线性补偿》(江东、杨嘉祥、赵宏)采用分段线性化的方法进行温度传感器的非线性补偿。现代方法主要指基于人工智能的方法,常采用的方法包括神经网络、支持向量机、模糊逻辑、遗传算法、专家系统、粗糙集、灰色系统理论和小波分析,以及各方法之间的融合等。
在对人脑生物神经元性质进行深入研究的基础上,心理学家 McCulloh 和数理逻辑学家 Pitts于 1943 年提出了第一个简化神经元模型,简称 MP 模型。60 年代初,Rosenblatt 提出神经网络的感知器模型,Widrow 提出自适应线性元件模型,从而获得了简单的线性分类器。但对于更复杂的高阶谓词问题,由于缺少有效的学习算法,感知器并不能有效地予以解决。Minsky 和 Papert于 1969 年发表了很有影响力的《Perceptron》一书,证明了单层感知器计算的本质局限,一度使神经网络研究走向低谷。1982 年,美国物理学家 Hopfield 用能量函数的思想解决了具有对称触突连接的递归网络的学习算法,使得神经网络走向具体的电路实现。1986 年,Rumelhart 和McClelland 等提出多层前馈网络的“误差反向传播算法”(Back Propagation),即 BP 算法,使多层前馈网络模式分类器走向实用化,大大推动了神经网络研究的发展,再一次唤起了人们对神经网络研究的兴趣。此后,在多层感知器网络的基础上,又派生出若干形式的前馈网络。
20 世纪 90 年代中期,由于神经网络等学习方法在理论上缺乏实质性进展,统计学习理论开始受到越来越广泛的重视。在统计学习理论的 VC 维理论的基础上,按照结构风险最小化原理,Vapnik 等人发展了一种新的通用机器学习方法——支持向量机(Support Vector Machine,简记为SVM)。SVM 根据有限样本信息在模型的复杂性和学习能力之间寻求最佳折中,以获得最好的推广能力。由于其既有严格的理论基础,又能较好地解决小样本、非线性、高维数和局部极小点等实际问题,因此它已被广泛应用于模式识别、回归估计和概率密度函数估计等领域,如手写体识别、生物信息识别、人脸识别、文本识别、系统辨识和故障诊断等,并且取得了很好的效果,表现出很多优于已有方法的性能。目前,支持向量机已成为国际研究的热点。近年来,许多关于 SVM 方法的研究,包括算法本身的改进和算法的实际应用,都陆续提了出来:固定工作样本集的方法最早是由 Osuna 等提出的。为了减少 SVM 学习方法的计算复杂性,利用 SVM优化问题本身所具有的特性,近年来已经提出了几种改进的支持向量机的训练算法。主要有 3大类:以 SMO 为代表的分解算法;以 EG 为代表的多变量更新算法;以 IDA 为代表的序列方法。另外,还有学者改变了标准 SVM 的优化目标,把二次型优化问题转化为线性优化问题,Suykens提出了最小二乘法支持向量机 LS-SVM 等。
自从 1965 年美国加州大学的 Zadeh 教授创建模糊集理论和 1974 年英国的 Mamdani 教授成功地将模糊控制应用到蒸汽机控制以来,模糊逻辑系统在系统的建模和控制上都得到广泛地应用。模糊逻辑系统成功应用的根源在于,模糊逻辑系统能够很好的利用专家知识,并且模糊逻辑本身提供了专家构造语言信息并将其转化为控制策略或系统特征模型的一种系统的推理方法,因而能够解决许多复杂而无法建立精确数学模型的系统的控制问题和许多难以用数学方法建模的复杂系统建模问题。
1987 年,Bart Kosko 在《Fuzzy Associative Memories》(Kosko B)中率先将模糊理论和神经网络有机结合进行了较为系统的研究。在这之后的时间里,模糊神经网络的理论及其应用获得了飞速的发展,各种新的模糊神经网络模型的提出及与其相适应的学习算法的研究不仅加速了模糊神经理论的完善,而且在实践中也得到了非常广泛的应用。1990 年中国科学院自动化研究所应行仁、曾南,提出采用 BP 神经网络记忆模糊规则的控制,并进行了倒立摆的仿真实验。1993年,Jang 提出了基于网络结构的模糊推理的概念,并设计了网络结构模型,这种网络结构便是模糊神经网络的雏形。自此以后,研究人员设计了各种各样的模糊神经网络结构和学习算法。
为了降低支持向量机对噪声和野值点的敏感度,提高泛化能力,其中一种途径是对传统支持向量机引进新参数,近年来,学术界开始综合模糊理论和支持向量机理论的优点,日本 Kobe大学 ShigeoAbe 和 Takuya Inoue,以及台湾大学的 Lin ChunFu 和 Wang ShenDe 提出来一种模糊支持向量机(fuzzy support vector machine, FSMV)。中国农业大学杨志民和田英等研究了当训练点的输出为模糊数时支持向量机的构建问题,提出了另一种模糊支持向量机。国防科技大学的刘冠军和苏永定等人,提出了一种综合型模糊支持向量机,并应用于故障诊断中。《Multisensors Fuzzy Stochastic Fussion Based on Genetic Alogrothms》(Hu Chang-zhen,Tan Hui-min)提出了一种基于遗传算法的多传感器模糊随机信息融合方法,并通过计算机仿真验证了该方法的有效性。《基于小波支持向量机的传感器非线性校正》(高云红、李一波)将小波与支持向量机融合用于传感器非线性校正,《小波-神经网络在 MDF 缺陷定位检测中的应用》(孙建平、王逢瑚、朱晓冬)将小波与神经网络相结合,用于缺陷定位检测中。
齿槽效应是本课题中悬浮间隙传感器所特有的一个问题,目前在高速磁浮列车系统中是通过传感器与列车系统的整体配合处理这一问题的,一方面在传感器的探头电感线圈中,通过对线圈形状的优化,限制传感器齿槽波动的幅值,另一方面列车以较高的加速度加速至 300KM/H后,传感器的齿槽波动将自动被控制系统滤除,因此需要列车快速启动并达较高速度,但当列车在试验或低速情况时仍然受到传感器齿槽效应的影响。另外,《高速磁浮列车悬浮间隙传感器的研究》(吴峻、周文武、李璐)和《Industrie T. Method for reliable determination of the distance of the conductive reaction track from a functional surface of a magnetic levitation vehicle moving relative to the reaction track and a sensor for performing the method》采用一种立体检测线圈形状,来改变磁场分布,削弱齿槽效应。《高速磁浮列车悬浮间隙传感器检测线圈的设计》(黄书童,祁征,陈林)采用两个相位差 180 度的检测线圈串联的办法减小齿槽效应。《高速磁悬浮列车悬浮间隙信号处理研究》(李璐、周文武、吴峻)利用悬浮系统中一个悬浮控制器对应的两个相邻传感器的信号,进行信息融合,经过迭代算法来抑制齿槽效应。这些方法都是从抑制、减弱齿槽效应的角度出发,并不能完全消除齿槽波动给悬浮控制系统带来的影响。
综上所述,虽然基于人工智能的传感器建模方法已有一定研究基础和积累,但在其应用中因工作场合不同都有其各自的特征,如“齿槽效应”就是在本课题中所要考虑的特有问题,有关人工智能方法在高速磁浮列车系统中的应用研究还较少,尤其人工智能在悬浮间隙传感器中的应用未见报道文献,而这些问题正是本课题研究的重点。























 京公网安备 11010202007575号
京公网安备 11010202007575号