浅谈广州地铁3号线列车定位技术
摘 要: 从移动闭塞的功能出发,阐述了广州地铁3 号线 ATC 系统的列车定位技术。3 号线信号系统以交叉感应环线为车-地通信介质,列车定位方面采用交叉感应环线进行粗略定位,采用车载测速发电机进行精确定位,同时还采用接近传感器进行站台辅助定位。此外还对定位技术中的抗干扰屏蔽、轮径补偿和空转及打滑监测等作了阐述。
关键词: 移动闭塞; 列车定位; 精确定位; 辅助定位
广州地铁 3 号线信号系统采用泰雷兹的 SelTrac S40 移动闭塞 ATC 系统,用交叉感应环线进行粗略定位,用车载测速发电机进行精确定位,同时还采用接近传感器进行站台辅助定位。
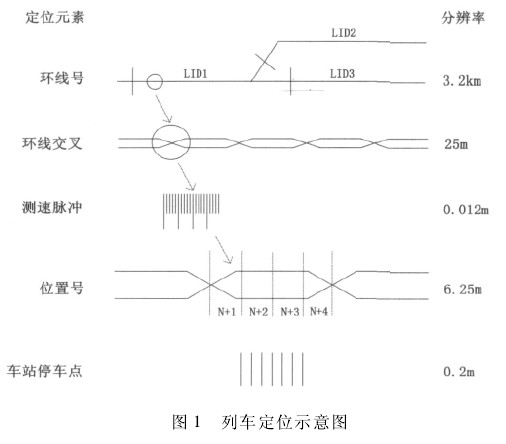
列车定位示意图如图 1 所示。一段交叉感应环线最长为 3. 2 km,且每段环线都有对应的环线编号,车载控制器 VOBC 能够准确地识别该编号,从而确定列车所处的环线。交叉感应环线每隔 25 m 相互交叉一次,车载接收天线将能够感应到环线电流相位的变化,以确定列车所处的环线交叉区域。列车每行驶 0. 012 m,车载测速发电机就会输出一个测速脉冲。列车的位置号按环线交叉距离的 1/4 即 6. 25 m 计算,当列车在车站停车时,车载接近传感器将会感应到轨旁的目标板,使得站台停车分辨率达到 0. 2 m。
1 粗略定位
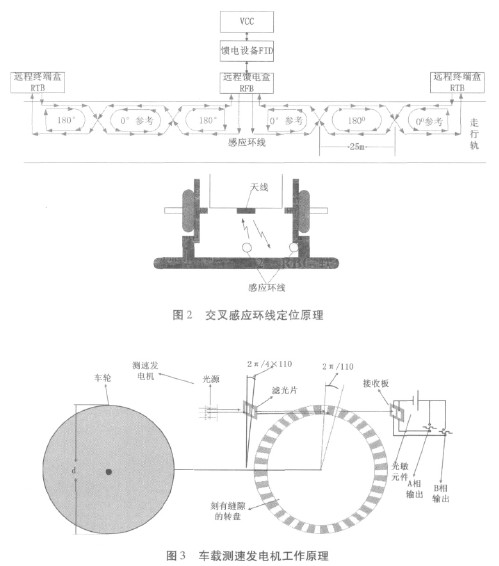
交叉感应环线电缆设在 2 根钢轨中间,2根导线相隔 25 m 交叉一次,在末端形成回路,利用闭合导线传送数据信息。列车底部安装有接收和发送天线,与轨道交叉感应环线之间产生电磁耦合,形成车-地双向通信。系统依靠交叉感应环线上传输的信息,即环线识别号和感应环线电缆 ( 交叉)物理坐标的改变,实现粗略定位。交叉感应环线定位原理如图 2 所示。
ATC 系统将线路划分为多个独立的感应环线,每个感应环线受各自环线通道的驱动。车辆控制中心 VCC 通过环线通道,在感应环线上发送轮询报文给 VOBC,如果轮询报文中的 VOBC 编码同列车的 VOBC 号码匹配成功,则该 VOBC 将返回响应报文给 VCC,从而可以将该车定位到某个具体的感应环线,使用感应环线编号来标识该车的位置。由于一条感应环线最长为 3. 2 km,因此通过感应环线编号定位的精确度即为 3. 2 km。
当列车经过环线交叉点时,接收天线接收到的信号将会产生一个 180°的相位差,此相位差便是环线交叉的检测手段。VOBC 会对同一环线内的环线交叉数进行计数,知道从环线始端开始的交叉数量,就能计算出列车距离环线始端有多少个25 m,从而将列车定位到 25 m 的精度。当列车进入一个新的环线区域之后,环线交叉点的数值将被重置。
2 精确定位
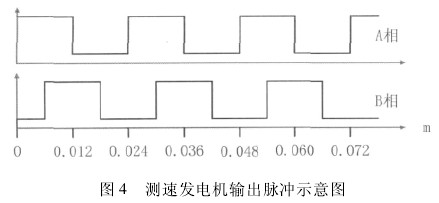
系统依靠车载测速发电机进行精确定位,所谓车载测速发电机其实是一个增量式光电编码器。车载测速发电机的工作原理如图 3 所示。
车载测速发电机与车轮同轴安装,车轮的转动将以相同的角速度带动测速发电机内的转盘转动。在该转盘的圆周上均匀地刻有 110 个缝隙,每 2 个缝隙之间的弧度为2π /110。在转盘的前方安装有光源,在光源与转盘之间安装有滤光片,在转盘的后方安装有光敏接收板,光源、滤光片、接收板和转盘缝隙均在同一水平直线上。由光源发出的光只有通过滤光片和转盘之后才能被接收板接收,接收板上的光敏元件见光之后将导通 2 路输出电路。滤光片上的 2 个狭缝之间的弧度为转盘狭缝的 1/4,即 2π/ ( 4 ×110) ,接收板上的 2 个光敏元件之间的弧度也为 2π/ ( 4 × 110) 。因此,2 路输出脉冲将呈现 90°的相位差,此相位差可以用来鉴别车轮转动的方向。以图 3 为例,如果 A 相输出先于 B相 90° ,则车轮顺时针转动,否则逆时针转动。
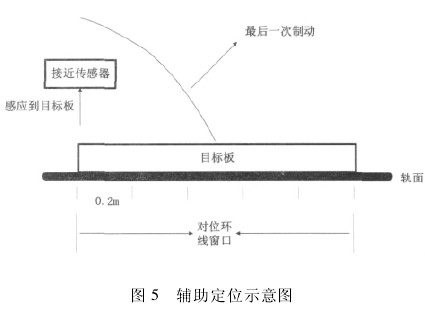
车轮每转动一周将输出 110 个脉冲。由于转盘狭缝宽度与狭缝之间的实体宽度相同,脉冲上下电平所对应的车轮转动弧度相同,方便系统采用脉冲上下沿同时计数。测速发电机输出脉冲示意图如图4所示。采用测速发电机定位的分辨率为( 其中车轮直径标准 d 为 0. 84 m) :

VCC 发送给 VOBC 的目标点和 VOBC 向 VCC报告的列车位置,均采用列车定位编号 ( VHPN) 。VHPN 以环线交叉距离的 1 /4 即 6. 25 m 为单位,当上述计数脉冲达到 6. 25 m/0. 012 m = 521 时,将输出一个 VHPN 计数脉冲,VHPN 从环线边界始端开始计算。VOBC 根据行车方向增加或减少 VH-PN 计 数, 任何环线的最大 VHPN 为 3. 2km /6. 25 m = 512。VOBC 将从 0 开始往上计数或者从511 开始往下计数, 从而将列车精确定位 到6. 25 m。
3 辅助定位
辅助定位用于站台精确停车。列车在站台对标停稳之后,车载对位天线和站台对位环线重合产生电磁耦合,ATC 车载系统将通过对位天线和对位环线与屏蔽门系统通信。为方便乘客上下列车,列车站台对位精度要求为 ± 50 cm。对位环线窗口在设计上也为 ± 50 cm,即为确保与屏蔽门通信正常列车站台对位精度要求为 ± 50 cm。为此,将列车站台定位分辨率设计为 20 cm。
系统依靠接近传感器进行辅助定位,辅助定位示意图如图 5 所示。接近传感器安装在车底,目标板 ( 金属板) 安装在站台轨面。当接近传感器检测到目标板时,立即启动站台精确定位程序,给列车施加最后一次制动。同时监视测速发电机输出脉冲,以 20 cm 为单位报告列车位置。通过站台辅助定位,在大多数情况下能够将列车的站台定位精度确保在 ±10 cm 以内。
4 干扰屏蔽、轮径补偿和空转及打滑监测
电磁干扰、轮径误差和车轮空转及打滑都会直接影响到列车定位的准确性,从而影响到列车运行的安全,所以列车定位还需要一些干扰屏蔽、轮径补偿和空转及打滑监测措施。
4. 1 干扰屏蔽
由于交叉感应环线通信频率为 9 kHz、36 kHz和 56 kHz,为确保感应环线通信不受干扰,车载、正线和试车线的其他设备不能占用 9kHz、36 kHz和 56 kHz 附近的频段。
为避免错误的感应环线交叉检测,VOBC 生成一个环线交叉期望窗口。只有在距离期望检测的交叉点之前或之后很短的一段距离内,窗口才会打开。这个距离由测速发电机测量。此窗口保证了只有在真正的交叉点附近才能检测到环线电流相位的变化,任何不在此区域内的干扰信号引起的虚假交叉均被忽略。如果在交叉窗口关闭时仍然没有检测到交叉,VOBC 将认为交叉丢失,并在预先计算的25 m 处插入一个模拟交叉。如果连续 3 个交叉中有 2 个丢失,VOBC 将命令列车安全停车。
4. 2 轮径补偿
通过测速发电机测量列车位移时,轮径是重要的指标。但随着列车的运行,车轮会逐渐磨损,导致列车轮径变小。此时如果还以标准轮径 d =0. 84m 来计算列车位移,将会出现较大误差。为避免此问题,VOBC 提供了轮径补偿措施。列车每运行15周或者15000 km,就必须进行一次轮径补偿,将装有测速发电机的车轮直径输入到 VOBC 轮径补偿单元。轮径补偿单元提供一个 16 位车轮磨耗补偿开关,它以 5 mm 为单位为列车提供从770 ~ 840 mm的车轮磨耗补偿。当车轮直径小于770 mm 时,则必须更换整个车轮。
4. 3 空转及打滑监测
当车轮空转或打滑时,通过测速发电机测得的列车位移将不能正确反映列车实际位移。系统依靠加速度计和测速发电机监测列车空转及打滑。加速度计安装在 VOBC 机柜的底部,与车底保持在同一平面。当系统测量到的位移、速度和加速度之间的关系异常时,即可判断列车空转或打滑。一旦VOBC 检测到列车空转或者打滑,将命令列车紧急制动。如果列车空转或者打滑过度,系统将失去该车的位置信息,VOBC 同 VCC 的通信也将中断。VCC 将阻止其他列车进入通信中断列车最后一次确认的安全距离以内,直到该车重新建立位置信息或者人工将该车从 VCC 数据库删除。
5 结束语
本文详细阐述了 ATC 系统的关键性技术———列车定位,同时,为提高列车定位的可靠性,还需要一些抗干扰、补偿及安全措施。本文可对城市轨道交通列车定位系统的设计、施工和维护提供参考。
参 考 文 献
[1] 王长林,林颖. 列车运行控制技术[M]. 成都: 西南交通大学出版社,2006.
[2] 广州地铁 3 号线信号系统技术规格书[R]. 广州地下铁道总公司,2008,6.
[3] 广州地铁 3 号线数据通信设备维护手册[R]. 广州地下铁道总公司,2008,6.
[4] 广州地铁3 号线车载设备维护手册[R]. 广州地下铁道总公司,2008,6.























 京公网安备 11010202007575号
京公网安备 11010202007575号