既有地铁线隧道结构的自动化监测
摘 要: 文中介绍了地铁隧道自动化监测系统的组成以及工作原理,并以已经投入运行的某城市既有线隧道的自动化监测为例,阐述了自动化监测的实施过程,并将自动化监测数据和临近基坑的监测数据进行了对比分析。得出结论: 自动化监测可以真实反应出隧道结构的变形情况。
关键词: 自动化监测; 隧道; 布点; 变化量; 分析
进入 21 世纪,我国城市轨道交通建设事业迅速发展,以北京、上海、广州为例,已有和在建的地铁线路均为十余条,如此密集的地铁网,新建线路施工对邻近的既有线路隧道结构产生影响是无可避免,所以需要进行必要的沉降位移观测以掌握既有隧道结构的真实变形情况。传统的人工监测手段费时费力,不易于实现连续监测,加之既有线已经投入运营不可能随意中断,因此有必要采用全天候无人值守的自动化监测系统对其进行全天候监测。
自动化监测系统相对于人工监测具有高效、准确、实时性强等特点,最主要的是它可以全天候无人值守的进行连续不间断监测,因此许多地区均采用自动化监测系统来进行隧道变形监测。
1 自动化监测系统
1. 1 自动化监测系统的组成
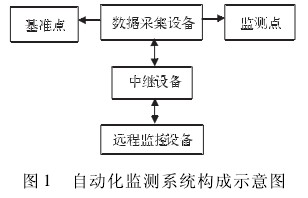
自动化监测系统一般由数据采集设备、中继数据传输与通讯设备和远程监控设备构成,如图 1 所示。数据采集设备和中继设备之间通过通讯和供电电缆连接,远程监控设备通过有线或者无线网络与中继设备连接并对其进行远程控制。
数据采集设备一般为具有自动马达和可编程功能的智能型全站仪,也称为“测量机器人”。其内置自动目标识别系统,可以自动搜索目标、精确照准目标、跟踪目标、自动测量、自动记录数据,快速完成对目标点的观测,像机器人一样对多个目标作持续和重复观测,并具有计算机远程控制功能。目前广泛使用的主要是徕卡 TCA 系列自动化全站仪。
中继数据传输与通讯设备为安装有监测软件的计算机。中继计算机安装于自动全站仪附近,通过通讯及供电电缆和自动全站仪连接,并对自动全站仪进行控制,监测软件具有数据传输、系统通讯控制功能,可以控制全站仪对监测点进行周期性观测,同时将观测数据预处理后由网络发送给远程监控设备。
远程监控设备为安装有监控软件的计算机。一般安置于远离监测区域的地方,通过网络对中继计算机进行远程控制,操作人员通过远程监控软件对监测工作进行管理,例如调整观测周期、观测时间、测回等,并且还能对中继计算机发送来的监测数据进行二次处理。
1. 2 自动化监测的工作原理
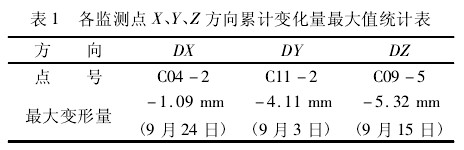
自动化监测一般采用的是极坐标测量法。首先选择合适的位置作为测站点安置全站仪,一般将其安置于隧道侧壁的强制对中托盘架上。在远离变形区域选择合适位置如隧道侧壁安置基准点,变形点则设置为监测断面形式,一般每隔 10 m 设置一个监测断面,每个断面固定安置测点 5 个,均匀分布于隧道顶板、侧壁和底板,以求真实反映隧道整体变形情况。
全站仪观测时采用极坐标测量法依照设定的顺序对基准点和监测点进行数据采集,数据采集完成后中继计算机对数据进行预处理并发送至远程监控计算机,同时做好对下一周期数据的采集准备,远程监控计算机接收到数据后通过二次处理就可以得到所需的各个监测点的 x、y、z 三维变形量,同时还能以报告形式输出累计变形量等参考数据供监测人员进行分析。监测人员可以根据具体情况使用远程监控计算机对监测周期、观测测回、起始时间等进行修改。
2 实例应用
以某城市已运行的既有地铁线 2 号线为例,其临近位置有新建线路地铁 7 号线的一个车站基坑进行施工作业,车站基坑距离既有线隧道最近位置约为 6 m,因此在7 号线车站基坑施工期间采用自动化监测方法对既有线隧道受影响区域进行自动化监测。
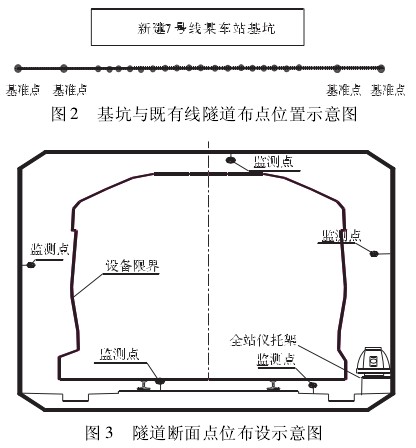
如图 2 所示,将基准点布设于远离基坑施工影响的区域之外,两端各布设 2 个基准点。考虑监测范围约为 180 m,因此在既有隧道受基坑影响的区域内依次布设 18 个断面,断面之间间隔 10 m,每个断面上布设 5 个监测点,基准点和监测点均不得侵入设备限界内。断面上布点示意图如图 3 所示。
建立与既有线路中线一致方向的坐标系统,以测站点为原点 O,沿线路中线方向为 X 轴,纵向垂直线路中线方向为 Y 轴,竖向垂直于 XOY 平面为 Z轴。建立坐标系后在临近基坑开挖之前进行初始观测,选取较为稳定的几期数据的平均值作为初始观测值。依照设计要求,自动化监测的限值为隧道结构总变形量不超过 ± 20 mm,警戒值取限值的 70%即不超过 ±14 mm。
基坑开挖期间设定监测频率为每隔 2 小时监测1 次,每次基准点观测 4 测回,监测点观测 2 测回。自7 月3 日投入监测开始,直到10 月19 日基坑开挖至底并完全封闭中板,监测 109 天共 1236 期数据。数据最大变形量统计如下表 1 所示。
由表 1 可以看出,X 方向累计变化量最大为 -1. 09 mm,Y 方向累计变化量最大为 - 4. 11 mm,Z 方向累计变化量最大为 -5. 32 mm,因此整个自动化监测过程中各方向最大累计变形量均不超过 ±14 mm,即没有超过设计警戒值。
3 监测数据对比分析
由各期监测数据可知,X 方向变化量很小,说明临近基坑施工对隧道结构在中线方向上基本没有影响。而在 Y 和 Z 方向上隧道结构有一定的变形情况产生,选取隧道侧壁监测点 C11 -2 在 Y 方向和隧道底板监测点 C09 -5 在 Z 方向的监测数据各 10 期,分别于同时间基坑对应位置的测斜、轴力进行比较。
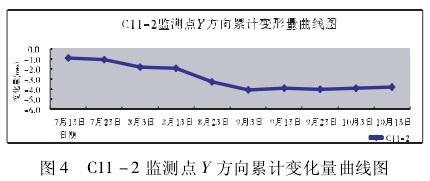
选取 C11 - 2 从 7 月 3 日到 10 月 19 日期间的任意 10 天的中午 12: 00 的 Y 方向监测数据,如图 4所示,负值表示隧道向基坑方向位移。
C11 - 2 监测点位于断面 11,断面 11 位置对应于7 号线车站基坑的中部,与断面 11 位置相当的车站基坑测斜孔为 CX06,因此选取与 C11 -2 点相同日期的CX06 号测斜孔 10 天的测斜数据,如图 5 所示,正值表示向基坑内移动,负值表示向基坑外侧移动。
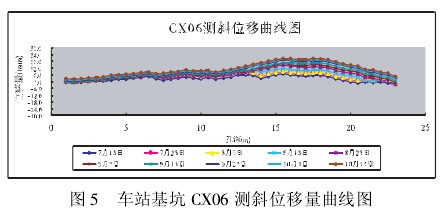
既有 2 号线隧道 C11 - 2 点的大致埋深位置约为 18 m,7 号线车站基坑的深度为 19 m。由图 4 可以看出,从 8 月 13 日到 9 月 3 日,C11 -2 点在 Y 方向上有明显偏向于基坑方向的位移,之后数据趋于稳定。从图 5 可以看出,随着基坑的不断开挖,CX06测斜有明显偏向基坑内侧的位移,这与 C11 -2 监测到变化趋势在方向上一致,从8 月10 日到9 月1 日,基坑开挖范围为 13 ~19 m,在这段时间内测斜 CX06在 15 ~ 20 m 的监测范围内变化明显。因此可以看出,自动化监测到的变形趋势和基坑测斜监测到的变形趋势,在时间和空间上基本吻合,为了更进一步验证,列举 8 月 3 日至 9 月 13 日基坑 CX06 测斜附近的第二道支撑轴力,如表 2 所示。

由深度约为 13 m 左右的基坑第二道支撑的轴力可以看出,从8 月13 日至9 月3 日,轴力有明显的增大,轴力负值表示支撑受到了向基坑内侧的压力,这也进一步验证了隧道自动化监测得到的变形趋势和基坑监测的变形趋势是一致的。
选取 C09 -5 监测点 10 天的中午 12: 00 的 Z 方向监测数据,日期与之前相同。如图 6 所示,负值表示下沉。
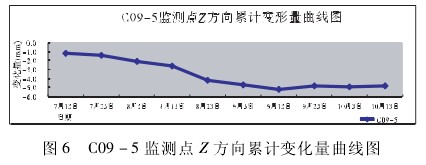
由图6 可以看出,从7 月13 日至9 月13 日开始,隧道处于连续沉降的过程,随后趋于稳定,不再继续下沉。造成隧道结构下沉的原因主要是车站基坑开挖过程中打设降水井进行降水作业,并在基坑开挖期间不间断进行抽水,由于既有 2 号线隧道距离基坑仅有6 m,因此基坑降水导致隧道下方土层内地下水位下降,因此在基坑开挖降水期间隧道有一定的沉降,基坑开挖至底停止降水后,数据显示隧道也停止了下沉,转而趋于稳定。这说明自动化监测得到的变形趋势也和临近基坑施工的工况是相吻合的。
4 结 论
( 1) 自动化监测无论在精度上还是在实效性上完全可以真实反应隧道结构的变形情况,加之其能够 24 小时无人值守不间断观测,因此更能满足运营隧道安全保护监测的要求。
( 2) 自动化监测的测点固定于隧道结构上,且距离基坑有一定距离,因此与基坑测斜位移量相比,自动化监测位移量较小。
( 3) 对自动化监测的数据进行分析时,应参考和结合周边工程施工的工况及相关监测数据进行综合分析。
参考文献:
[1] 张正禄,李广云等. 工程测量学[M]. 武汉: 武汉大学出版社. 2005.
[2] 陈永奇,吴子安,吴中如. 变形监测分析与预报[M]. 北京: 测绘出版社. 1998.
[3] 卫建东. 智能全站仪自动监测系统及其在地铁结构变形监测中的应用[D]. 郑州: 解放军信息工程大学测绘学院,2002.
[4] 梅文胜,张正禄等. 测量机器人在变形监测中的应用研究[J]. 大坝与安全. 2002( 5) .
[5] 张项铎,张正禄 . 隧道工程测量[M]. 北京: 测绘出版社. 1998.
[6] GB50026 -2007,工程测量规范[S].
[7] GB50497 -2009,建筑基坑工程监测技术规范[S].
[8] JGJ8 -2007,建筑变形测量规范[S].























 京公网安备 11010202007575号
京公网安备 11010202007575号