动力学仿真地铁车辆动态包络线计算方法
2012-08-30 22:05
动力学仿真地铁车辆动态包络线计算方法
摘 要 在CJJ 96—2003《地铁限界标准》计算各种限界的基础上,提出了一种基于动力学仿真的地铁车辆动态包络线计算方法。在地铁限界的计算中结合车辆动力学仿真,能更加科学可靠地校验地铁车辆运行的安全性,也能制定出更加安全经济的地铁限界。
关键词 地铁车辆;动态包络线;动力学仿真
为节省工程造价,地铁隧道的截面尺寸越紧凑越好,但必须保证运行车辆的任何部分都不能与隧道内的设备或建筑物相碰。为以最低的工程造价达到车辆最大的安全性的目的,地铁车辆和隧道的限界必须很好地加以配合,以充分利用有限的空间。这就要求对地铁车辆在运行时所形成的最大轮廓即动态包络线进行详细的、科学的计算。
MATLAB是目前世界上最为常用的以数值计算为主的计算软件,其自带仿真工具包Simulink可以方便地建立框图式动态系统模型,与传统的仿真软件相比,具有更直观、方便、灵活的特点。现采用Simulink仿真工具包建立车辆的动力学模型,并根据输入的轨道不平顺时域响应得到的仿真结果与CJJ 96—2003《地铁限界标准》的车辆限界计算公式结合计算,可得到车辆动态包络线。
1 车辆动态包络线
车辆动态包络线限界首次出现在英国。它是动态限界的扩大,将轨道几何偏差(轨距、水平、方向、高低和磨耗等)所引起的车辆位移一起包括在内,是运行中的车辆在最大横移、摇头和点头时可能达到的最大轮廓线。对动态限界而言,这些位移是归在动态限界的外部安全空间中的。因此,动态包络线考虑的位移要素比动态限界增加了若干项,能更好地利用空间,是一种更加完善的限界校验方法。
2 动态包络线中与车辆运行工况相关的影响因素
在《地铁限界标准》中,车辆限界包含了下列计算要素:①车辆的制造误差;②车辆的维修限度;③转向架轮对处于轨道上的最不利运行位置;④转向架构架相对于轮对的横向及竖向位移量;⑤车体相对于转向架构架的横向及竖向位移量;⑥车体相对于轨道线路的最不利倾斜位置;⑦车辆的空重车挠度差及竖向位移量;⑧因车辆制造、载荷不对称等引起的偏斜;⑨车辆一系悬挂及二系悬挂侧滚位移量;⑩轨道线路的竖向及横向几何偏差、磨耗、维修限度及弹性变形量。其中第④、⑤、⑦和⑨项与车辆的运行工况相关,如车辆速度、曲线半径等。车辆限界的横向和竖向偏移量的计算公式中包含了一些与车辆运行工况参数相关的计算项。例如,计算项中含有如下的车辆运行工况参数:转向架二系弹簧横向弹性变形量(动态)Δw3;横向振动加速度αB;转向架一系弹簧竖向动挠度Δfp;转向架二系弹簧竖向动挠度Δfs。
这些计算项不仅与车辆运行速度、曲线半径相关,而且与横向止挡、竖向止挡有关。在《地铁限界标准》的车辆限界计算公式中并没有体现这些计算项与车辆运行工况的关系,也没有考虑到横向、竖向止挡的作用(但横向位移量和竖向位移量大小受限于车辆结构上的横向止挡及竖向止挡),更没有考虑到悬挂元件的非线性因素。因此,为了更加合理可靠地计算校验地铁车辆运行的安全性,制定出更加安全经济的地铁限界,可将《地铁限界标准》的车辆限界计算公式结合车辆动力学仿真来实现,使计算出的车辆动态包络线更能反映车辆结构参数对其影响,更加合理地校核地铁车辆运行的安全性。
3 基于动力学仿真的车辆动态包络线计算
为了使计算出的车辆动态包络线与体现车辆结构参数的仿真结果结合在一起,需要对《地铁限界标准》的车辆限界计算公式中与车辆运行工况相关的几项进行修改:
1)与参数Δw3相关的项 应包含车体的横移、摇头和侧滚三项,因此将该项改为:
应包含车体的横移、摇头和侧滚三项,因此将该项改为:
应包含车体的横移、摇头和侧滚三项,因此将该项改为:
式中:
yb———车体横移量;
θb———车体摇头角;
n———车体计算断面至相邻中心销的距离;
a———车辆的定距;
φb———车体侧滚角;
Y———控制点的竖坐标;
hsc———车体重心距轨面的高度。
2)与参数Δfs相关的项 应包含车体的浮沉、点头和侧滚三项,因此应将该项改为:
应包含车体的浮沉、点头和侧滚三项,因此应将该项改为:
应包含车体的浮沉、点头和侧滚三项,因此应将该项改为:
式中:
zb———车体浮沉量;
Фb———车体点头角;
X———控制点的横坐标。
3)与参数Δfp相关的项 应包含构架的浮沉、点头和侧滚三项,因此应将该项改为:
应包含构架的浮沉、点头和侧滚三项,因此应将该项改为:
应包含构架的浮沉、点头和侧滚三项,因此应将该项改为:
式中:
zt———构架浮沉量;
Фt———构架点头角;
m———转向架计算断面至相邻轴的距离;
p———转向架固定轴距;
φt———构架侧滚角。
本文采用Simulink仿真工具包建立车辆系统的动力学模型。将包括运行工况在内的车辆参数载入该模型,并输入轨道的激扰,进行仿真分析,得出与运行工况相关参数的时域仿真结果,即车体横移量、车体摇头角、车体侧滚角、车体浮沉量、车体点头角、车体侧滚角、构架浮沉量、构架点头角、构架侧滚角和横向振动加速度等的时域结果,以及一系止档竖向刚度和二系止档竖向刚度的状态结果。对于前10个仿真结果,按其性质应属于随机且按高斯概率分布。本文采用仿真结果均方根值的3倍来作为仿真结果可靠度的评价,则该10个仿真结果的可靠度为:
式中:
P———可靠度;
σ———某一仿真结果的标准差;
μ———某一仿真结果的均值。
对于后面两个仿真结果,按其性质,并不属于高斯分布,在此取其仿真结果的最大值。
得到这些仿真结果后,结合《地铁限界标准》的计算公式,可计算出各个控制点的偏移量。
由于车体或转向架的轮廓可能为非规则的,故端面的偏移量可能并非最大,而可能是某一突出的断面。因此,在计算各个控制点的偏移量时,为了真正考虑到各个断面对动态包络线的影响,本文中采用对每个控制点都赋予独立的n值或m值,然后根据这些偏移量求出控制点的最大包络线。由此得出的车辆动态包络线可包含不同断面的实际包络线。
4 动态包络线的计算结果比较
本文所采用的通过仿真分析结果得出的参数来进行车辆动态包络线的计算,与《地铁限界标准》相比,能更好地与车辆的运行工况、结构参数更紧密地结合。这主要体现在:
1)在《地铁限界标准》的偏移量计算公式中并没有体现动态包络线与车辆运行速度、曲线半径即运行工况的关系,而本文方法则计及了这些因素。
2)实际车体的横向位移受横向止挡限制,车体的竖向位移受空气弹簧下面的应急弹簧限制。但《地铁限界标准》的一系、二系弹簧竖向刚度假定为线性特性,车辆限界的计算公式中也并没有体现横向、竖向止挡的作用,使计算结果偏于安全。采用结合动力学仿真的方法可以很好地弥补这一缺陷。
3)在计算非正常运行工况时,直接采用《地铁限界标准》不能很好地体现空气弹簧失效、轴箱弹簧破损折断和抗侧滚扭杆失效等非正常工况对车辆动态包络线的影响,而仿真计算出的参数则可以包含这些非正常因素的影响。
总之,本文的方法更能反映车辆运行工况及车辆本身结构参数对车辆动态包络线的影响,可计算出更加严格的车辆动态包络线。
5 限界软件开发
地铁限界设计和校核的工作量非常大,虽然现在已经有多种关于地铁限界计算的程序或软件,但功能不完全,也没有真正做到限界设计和校核的自动计算,故限界计算仍然是困扰工程师们的一项工作。为了使限界计算简单、方便、安全、可靠且经济,需要开发一套在操作上、功能上和算法上都优化的软件。
本文采用MATLAB-GUI软件进行界面开发,设计出一套功能齐全、算法新颖的限界计算软件。其主界面如图1所示。
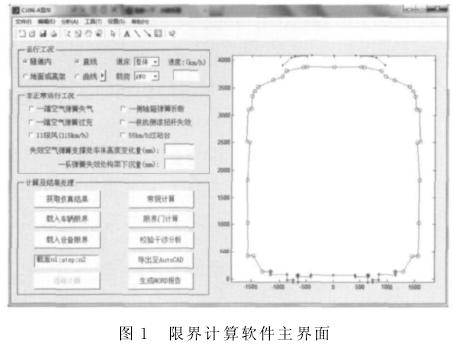
该限界计算软件具有以下特点:
1)借助“图形用户界面”方便用户使用。它极大地方便了非专业用户的使用,人们不再需要死记硬背大量的命令,取而代之的是可以通过窗口、菜单、按键等方式来方便地进行操作。
2)算法上采用与动力学仿真结合的方式。该软件的算法不再是对《地铁限界标准》的公式进行简单的运用,而是对它进行修改,使其能使用仿真的结果进行计算。算法采用《地铁限界标准》的公式和动力学仿真相结合,不仅能体现限界计算与车辆运行速度、曲线半径的关系,而且也能体现与横向止挡、竖向止挡以及悬挂原件的非线性关系。限界计算时,先用Simulink仿真工具包进行仿真,然后用该软件获取仿真的结果进行设计或校核计算。
3)功能多样。该软件不仅实现了国产A型、B1型和B2型地铁车辆的动态包络线计算,以及车辆限界和设备限界设计与校核的一般功能(此校核功能是自动完成的,且车辆轮廓控制点的个数可以是任意的),而且增加了头车加长削形计算、车下设备轮廓计算、限界门计算及非正常运行工况下的动态包络线计算。
4)连续计算功能。软件中不仅可以对车辆的单个截面进行动态包络线计算,而且可以对车辆的多个截面进行连续计算。其截面与截面之间的距离可由用户自己定义,这样,不仅可计算各个截面形状基本相同的车辆,也可计算各个截面形状都不相同的车辆。
5)自动绘图。该软件具有将计算出的动态包络线、车辆限界和设备限界导出到AutoCAD软件,实现自动绘图的功能。导出的文件为DXF格式(DXF是一种基于矢量的ASCII文本格式)。由于AutoCAD是现在最流行的CAD系统,DXF也被广泛使用,因此绝大多数CAD系统都能读入生成的DXF文件。
6)自动出报告。该软件也具有将计算参数和计算出的结果等信息自动生成Word文本报告的特殊功能,真正实现了自动化,减少了操作人员的工作量。
7)项目管理方便。该软件对一个项目进行保存时,此项目的全部信息都将保存在一个项目文件夹中,以方便用户管理项目。而且,下次用户要用此软件打开一个项目时,只要选择项目文件夹,软件就会自动读入该项目的所有计算信息。
参考文献
[1] CJJ 96—2003地铁限界标准[S].
[2] 罗湘萍.全动态包络线地铁车辆限界研究[J].铁道车辆,1997,35(9):38.
[3] 孔令洋,梁青槐.地铁限界CAD系统设计及开发研究[J].都市快轨交通,2004,17(6):24.


