列车自动驾驶系统节能策略及工程实现
2013-04-25 23:00
列车自动驾驶系统节能策略及工程实现
1 北京地铁亦庄线ATO节能分析
2011年春,为验证列车自动驾驶对系统运行能耗的影响,地铁运营公司在北京地铁亦庄线组织进行了2次全线全天耗电量统计,能耗数据见表1(全天耗电量数据来源于亦庄线供电站电表在一天内走过数值的累积)。
表1中三月份的统计数据显示,在全天客流量基本相同的前提下,全天采用ATO自动驾驶比全天采用ATO辅助人工驾驶耗电要多;而四月份的统计数据显示,在全天客流量较小的前提下,全天采用ATO辅助人工驾驶却比采用ATO自动驾驶耗电要多。
因数据来源、统计方式等原因,上述耗电量统计数据也许不足以说明亦庄线ATO自动驾驶较人工驾驶费电,但此次耗电量统计使得亦庄线自动驾驶能耗问题受到了包括地铁运营公司、地铁建设公司、ATO供应商的广泛重视。深入分析ATO驾驶能耗规律,优化ATO算法,使自动驾驶更节能,成为各方共同的认识和需要。
2 司机驾驶习惯分析
比较ATO自动驾驶和人工驾驶的能耗,应首先从分析司机的驾驶习惯入手。为此,随机抽取2011年4月10日010车全天的司机人工驾驶数据进行分析。典型人工驾驶区间运行曲线见图1。
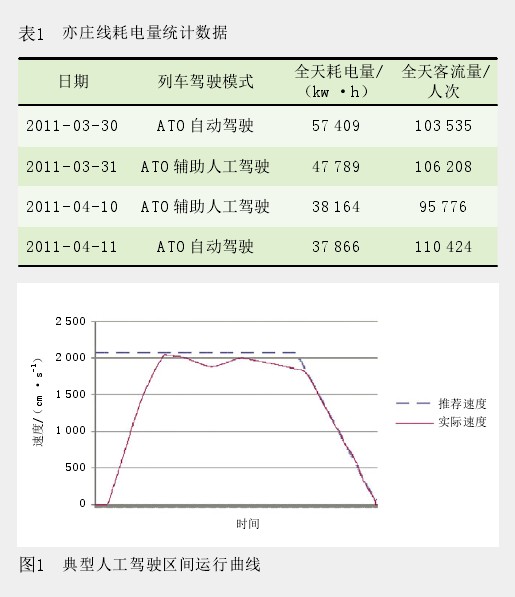
通过分析,得出如下司机驾驶习惯:(1)司机在出站启动时牵引级数增长较快;(2)司机在出站后将列车加速到接近推荐速度,然后使列车保持惰行状态,直到列车速度远低于推荐速度再牵引,或到进站停车推荐速度下降时再进行制动;(3)司机在进站制动阶段基本按照推荐速度驾驶,并最终控制列车进站停车。
通过国内外的大量研究,目前普遍认可应采用下列驾驶策略达到节能目的:出站即施加最大牵引达到区间巡航速度,巡航过程中尽量保持惰行,并尽量减少制动频率,接近站台时采用一次性连续制动停车。
可见,亦庄线司机的驾驶习惯与上述以节能为目的的驾驶策略基本一致。
3 ATO节能控制算法设计
目前对于巡航过程中牵引/惰行策略的算法研究,一般使用较为先进的计算方法和控制理论,如使用神经元网络、遗传算法等。这类算法通常能够通过迭代过程,利用计算机运算速度优势,精确找到牵引与惰行的切换点,并能实现区间运行时分的精确控制。但也存在不足:对计算机的运算能力要求较高,通常用于理论仿真,ATO作为对运算实时性有较高要求的嵌入式系统,实现上述方法的经济成本相对较高,不利于工程实现;同时复杂的在线算法为测试带来了一定难度,不利于工程验证。
通过分析司机的驾驶策略,能够设计出一套以模拟司机驾驶习惯为基础的、便于工程实施的ATO速度控制算法。该控制算法具备如下特征:(1)出站过程中,在保证一定乘客舒适度的前提下,尽快施加牵引,使列车速度达到推荐速度;(2)区间巡航过程中,尽量不施加制动,通过调整牵引/惰行策略,兼顾节能与运行效率;(3)进站制动过程中,按照推荐速度控制列车进站停车,并保证一定的乘客舒适度。
3.1 ATO在区间巡航过程中的驾驶策略
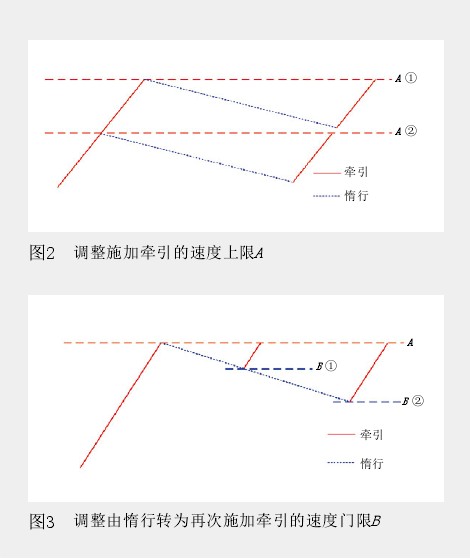
区间巡航过程中的牵引/惰行策略对列车节能起主要作用。ATO按下列策略控制列车在区间巡航阶段行驶:列车出站即施加牵引至速度A后开始惰行,直至速度降为B后,重新施加牵引至速度A 按上述过程循环,直至进入进站制动阶段后,开始按推荐速度施加制动并最终在站内停车。
基于上述策略,通过2种方法对驾驶策略进行在线调整,使ATO同时兼顾运行效率和节能的要求。
第一种方法:调整施加牵引的速度上限A(见图2)。以上限A ②为策略驾驶的区间运行时间长于上限A ①,但对于长度较短的区间,节能效果好于上限A①。
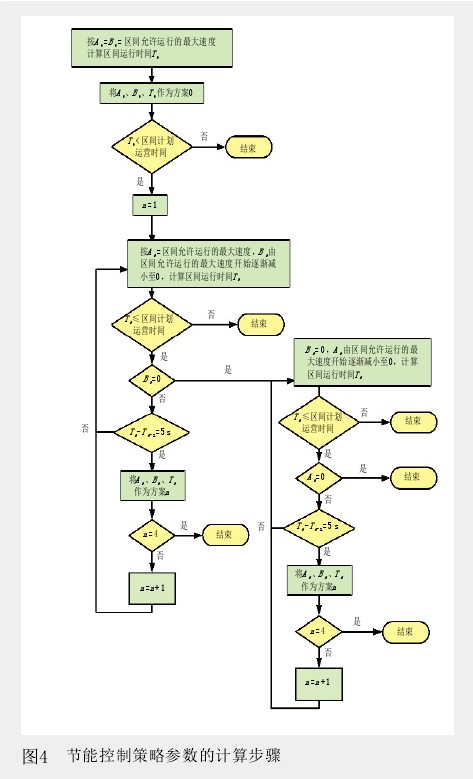
第二种方法:调整由惰行转为再次输出牵引的速度门限B(见图3)。以门限B②为策略驾驶的区间运行时间长于门限B①,但节能效果好于门限B①。
3.2 节能控制策略参数(A和B)计算方法
基于线路数据、车辆特性和历史运行数据,可以计算出满足运营计划要求的节能控制策略参数A和B,并最终为指定区间给出多组节能控制方案。
为简化计算过程,计算方法基于下列假设:(1)ATO算法和车辆执行单元共同保证出站牵引至速度A过程中的加速度恒定;(2)ATO算法和车辆执行单元共同保证惰行结束后,由速度B牵引至速度A过程中的加速度恒定;(3)ATO算法和车辆执行单元共同保证进站制动过程的减速度恒定;(4)通过分析历史运行数据得到区间惰行时的惰行减速度具有一般性。
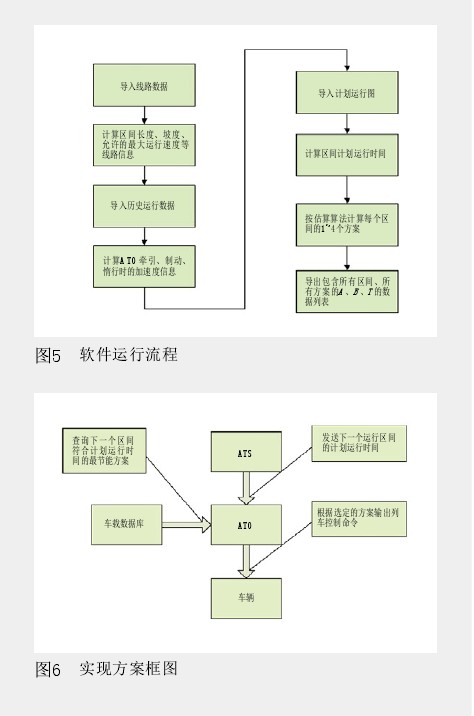
基于上述假设,可计算出ATO驾驶列车的实际速度曲线,并计算出参数A、B和区间运行时间T。节能控制策略参数的计算步骤见图4。
节能控制策略参数(A 和B )的算法可概括为:将A=B=区间允许运行的最大速度作为基本方案,并计算出区间运行时间T0。在基本方案的基础上,按先B后A的顺序下调参数至速度0,并计算相应的运行时间Tn,Tn与T0相差X(如5 s)时,可将相应的An、Bn、Tn作为一个节能控制方案,持续到选出N种(如4种)方案,或Tn超过区间计划运营时间,或再无参数可调时为止。
3.3 区间节能控制方案的自动化生成工具
利用MATLAB编写的软件可实现节能控制方案计算的自动化。软件具备下列功能:(1)能够批量导入线路数据、历史运行数据、计划运营图等数据,并自动分析生成方案所需的相关参数;(2)可设定不同方案的区间运行时间差;(3)可设定方案分析中调整A、B参数时的步长;(4)可设定每个运行区间允许的最大方案数N;(5)为每个运行区间计算出1~N个方案;(6)导出包含所有区间、所有方案的A、B、T的数据文件;(7)支持依据经验人工配置各区间各方案的A、B参数,并自动计算相应的区间运行时间T,以验证输入的方案是否满足区间计划运行时间的要求;(8)自动绘制指定区间、指定方案的模拟运行曲线。
软件运行流程见图5。
导出数据列表中的运行时间T是模拟计算的理论值,在将软件生成的节能控制方案用于实际工程前,还需在正线试验中根据实际运行时间进行调整。
3.4 节能控制策略在实际列车运行控制系统(ATC)中的实现方案
列车自动监控系统(ATS)根据当前线路的运营情况,计算出列车在下一个运营区间允许的最长运行时间,并将该时间通过无线网络发送给车载ATO,ATO以区间实际运行时间T 不超过ATS规定的最长运行时间为前提,查找本地存储的包含所有区间、所有方案的A、B、T 数据文件,并选择对应区间最节能的控制方案(通常是A和B参数较小的方案)控制列车行驶。实现方案见图6。
4 亦庄线现场方案验证
采用上述MATLAB软件仿真计算参数A和B的值,最终选择下列几组参数在亦庄线现场进行方案验证:(1)无惰行方案(即优化前的方案),A=推荐速度-2 km/h,B=推荐速度-2 km/h;(2)短惰行方案,A=推荐速度-2 km/h,B=推荐速度-4.5 km/h;(3)长惰行方案,A=推荐速度-2 km/h,B=推荐速度-7.5 km/h。
2011年4月28日晚,在亦庄正线使用YZ003车对采用节能优化算法的ATO应用程序进行单车现场方案验证。采用长惰行方案的上行同济南路—荣昌东街站运行曲线见图7,ATO的驾驶曲线与亦庄线司机的驾驶曲线极为相似。
4.1 区间运行时间比较
采用不同方案在亦庄正线进行常规交路运行,分别统计区间运行总时间(见表2)。
随着惰行时间的延长,区间运行时间有所延长,但仍在计划运行时间内,其中长惰行方案虽然比原方案的区间运行时间慢了70.6 s,但比计划运营时间提前了23 s。
4.2 能耗比较
采用不同方案在亦庄正线进行常规交路运行,分别统计耗电量(见表3)。
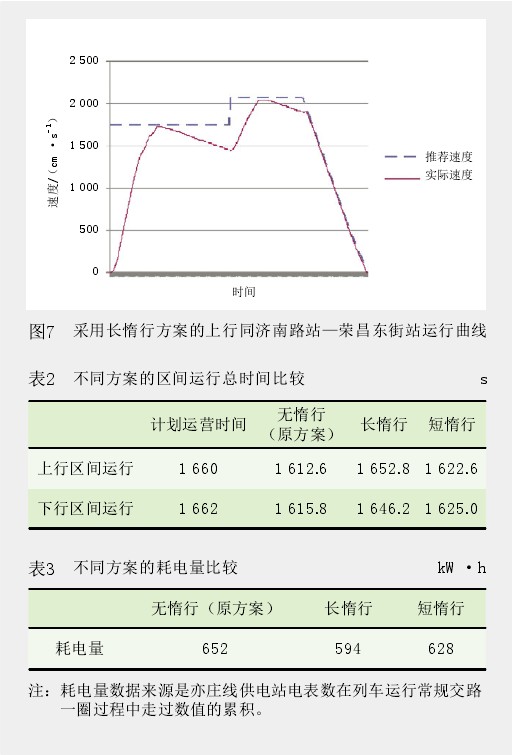
随着惰行时间的延长,耗电量有所减少,其中长惰行方案比原方案耗电量下降了约9%,达到了节能的目标。
5 结束语
综上所述,采用的节能控制算法在单车验证测试中通过,与旧算法相比,运行时间和耗电量指标均达到设计目标。新算法使用的A、B参数兼容无惰行的原方案,可根据实际情况灵活配置,并在新旧2种算法间自由切换,便于工程实施。上述实际ATC系统实现方案将在北京地铁14号线上采用,通过ATS的指令可同时达到区间运行时间调整和节能运行的目的。
由于列车在实际运行环境中,载客量、再生制动电力回收、电站电表读取方式等多种因素都会对耗电量统计造成影响,故未给出使用新算法的自动驾驶与人工驾驶的能耗比较,这也将成为下一阶段的研究方向。


