西安地铁2号线车辆防空转/滑行系统
摘 要: 文章介绍地铁车辆参考速度的选取、防空转防滑行的判断依据等,重点对西安地铁 2 号线车辆防空转/滑行系统的检测及控制原理进行分析说明,通过和其它地铁车辆比较,总结出 2 号线车辆防空转/滑行系统的特点。
关键词: 地铁车辆; 防空转/滑行系统; 参考速度; 黏着
0 引言
随着生活节奏的加快, 人们对交通工具———地铁的要求越来越高,即“快速、舒适、安全”。这就要求车辆有很大的牵引及制动能力, 但车辆的牵引及制动力不能无限的增大,当大于轮轨之间的黏着力时,车辆将发生空转/滑行, 反而降低了乘客乘坐的舒适度和安全性。 所以,如何有效地控制车辆充分利用黏着,将成为地铁能否“快速、舒适、安全”运营的关键。
地铁车辆的防空转/滑行系统包括空气以及电气两部分,关于机车车辆空转/滑行的相关文献很多,但大多针对空气制动系统的防滑而言。 本文将系统地阐述地铁车辆空转/滑行的判断依据,以及西安地铁 2 号线车辆在牵引工况下出现空转和制动工况下出现滑行(空气制动、电制动)后的控制方法。
1 车辆参考速度的确定
车辆的参考速度是判断轮对空转/滑行的重要数据。 地铁车辆参考速度的选取一般遵循如下规则:
1)车辆在牵引工况时 ,系统将选取一个牵引控制模块所控制的所有轴中的最小速度, 作为判断本牵引控制单元所控制的各轴是否发生空转的参考速度。 例如西安地铁 2 号线车辆一个牵引逆变器控制一节车的4 台电机, 系统在牵引时选取本节车 4 个轴中最小速度作为空转判断的参考速度。
2)车辆在制动工况时,系统将选取一个制动控制模块所控制的所有轴中的最大速度, 作为判断本制动控制单元所控制的各轴是否发生滑行的参考速度。 例如西安地铁 2 号线车辆,制动系统采用车控方式,即一个制动控制模块控制一节车的 4 根轴, 列车在制动时选取这 4 个轴中的最大速度作为滑行判断的参考速度。
2 空转/滑行的判断依据
空转/滑行的判断依据很多,例如速度差、滑移率、减速度以及减速度的微分等。 由于地铁车辆的运行速度一般在 60~120 km/h 范围, 选取速度差及减速度作为判断依据就可以满足要求。
2.1 速度差
当车辆某一轴上两车轮发生滑行(空转)时,此轴的速度比其它轴的速度明显减小(增大),所以此时可以通过速度的差值判断出某一轮是否发生滑行 (空转)。
通过速度差判断的方法: 将一个制动控制单元控制的每根轴的速度与参考速度进行比较, 当差值大于预设定值 Δv 时,则判定此轮发生了滑行。 轮对空转的判断与滑行的判断的方法是一样的。
2.2 减速度(加速度)
当一个控制单元车辆的每根轴都不同程度的滑行(空转)时,各轴的速度与参考速度的差值未达到设定值 Δv,但实际车辆已经发生了滑行(空转),此时通过速度差已经不能判断出轮对的滑行(空转),需利用减速度(加速度)作为判断滑行(空转)的依据。
通过减速度(加速度)判断的方法:列车在制动时若某些轴发生滑行,此时滑行轴的减速度明显增大,当减速度超过预设定值 β 时,则判断此轴发生了滑行。列车在牵引工况时发生空转时的判断也是如此。
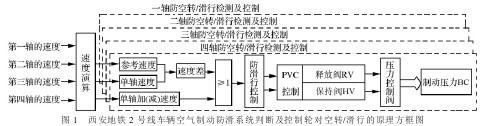
西安地铁 2 号线车辆空气制动防滑系统判断及控制原理如图 1 所示, 速度差与减速度只要两者中有一个达到预设定值,系统就认为此轴发生了滑行。
3 西安地铁 2 号线车辆空转/滑行的检测及控制
西安地铁 2 号线车辆空气制动下的防滑系统 (每节车都有)和电制动下的防滑系统(只在动车上有)是两个相互独立的系统。
3.1 空气制动工况下滑行的检测及控制
西安地铁 2 号线车辆制动系统使用 Nabtesco 公司的 HRA 系统,控制采用车控方式(即 1 个制动控制单元控制一节车的 4 根轴),同时在每个轴上安装一防滑阀,从而使空气制动下的防滑能够单轴进行控制调整。
3.1.1 空气制动下的防滑系统的构成
图 2 为西安地铁 2 号线车辆空气制动防滑系统简图。 空气制动防滑系统主要包括制动电子控制单元BECU、防滑阀、防滑速度传感器等。
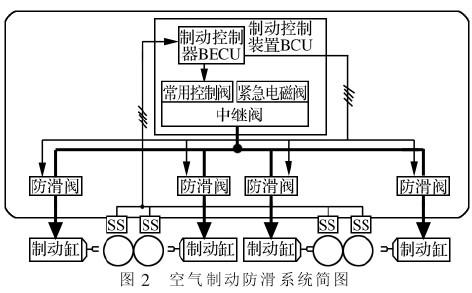
1)防滑阀 :在每个制动缸进气管路上安装一防滑阀。 每个防滑阀包括两个电磁阀,一个电磁阀控制制动缸的进风,另一个控制制动缸的排风。这两个阀的动作组合可形成三个不同状态:“充风”,两阀均失电,空气进入制动缸;“保压”,进风阀得电,排风阀失电,制动缸被隔离,空气压力恒定;“排风” 两阀均得电,空气从制动缸排出。
2)防滑速度传感器 :车辆在每个轴的轴端均安装防滑速度传感器, 通过每个轴端安装的速度传感器实时监控各轴的瞬时速度,并传输给本节车的 BECU。
3)制动电子控制单元 BECU:车辆在运行时,制动控制单元实时采集本节车的 4 个轴的速度, 然后通过计算各轴的速度差及减速度, 判断车辆各轴是否发生滑行,并进行控制。
3.1.2 空气制动滑行控制的原理
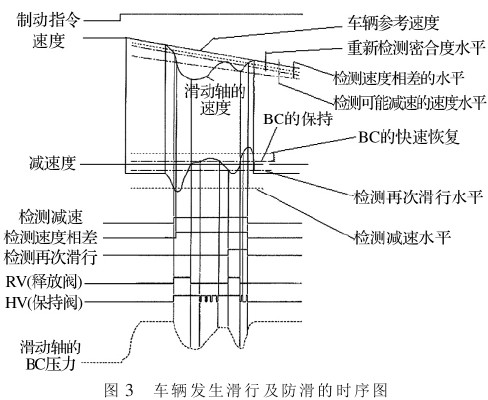
车辆在正常空气制动时, 制动控制单元接收司机发出的制动指令和车辆的载荷信号(载重量)综合计算出本节车所需制动力, 然后通过常用电磁阀产生 AC压力(预控制压力)给中继阀,中继阀将 AC 压力转换为 BC 压力给本列车各制动缸, 从而推动闸瓦进行制动。 同时车辆各轴端速度传感器将速度实时传给BECU, BECU 将各轴的速度进行比较计算, 当判断出某一轴发生了滑行时,BECU 控制本轴防滑阀进行排气,此时制动缸压力降低,制动力减小,此轮对恢复黏着。如此通过“速度传感器(采集速度)—BECU(进行判断)—防滑阀(排气/进气)—制动缸压力(降低/增大)—速度(增大/减小)—速度传感器(采集速度)”形成一闭环控制系统,控制防滑阀的排气、进气、保持,最终使车辆最大程度地利用黏着。 图 3 为车辆发生滑行及防滑的时序图。
3.2 电制动工况下滑行的检测及控制
西安地铁 2 号线车辆牵引系统使用日本日立公司的产品,控制采用先进无速度传感器的矢量控制技术。与传统的有速度传感器的控制技术相比, 无速度传感器的矢量控制在每个电机上没有安装速度传感器,从而使日常的维修量小,故障率大大降低。
3.2.1 电制动工况下防滑系统的组成
图 4 为西安地铁 2 号线车辆牵引及电制动工况下防空转/滑行系统控制原理图。
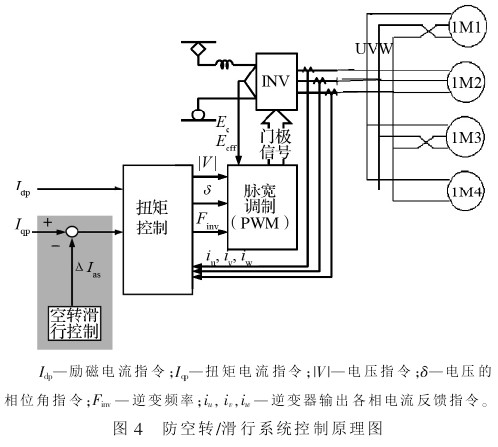
西安地铁 2 号线车辆 1 个牵引逆变器控制一节车上的 4 台电机, 系统通过检测电机定子磁场的旋转频率以及转子上的电流值来推断电机转子的频率, 同时系统通过控制电机转子上的电流值来控制列车的加(减)速度,进而控制列车速度。列车牵引及电制动下的防空转/滑行控制也是基于此原理。 首先系统实时推定电机的减速度, 当通过电机转子的减速度判断列车发生了空转/滑行后,逆变器迅速降低牵引电机的扭矩电流,进而控制电机扭矩力,使其重新恢复再黏着状态。
3.2.2 电制动工况下的防滑策略
西安地铁 2 号线车辆牵引系统, 在电制动下的滑行判断以及牵引工况下的空转判断都是以电机转子旋转频率的变化率为判断依据。 图5 为列车在牵引及电制动下防空转/滑行的判断依据。
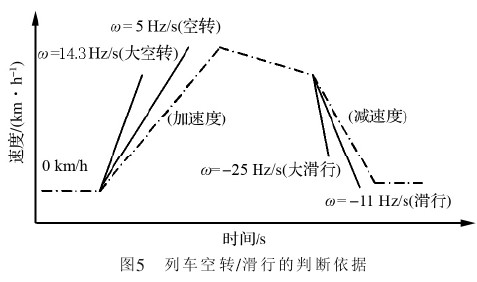
根据滑行严重程度的不同, 滑行的控制大概分如下几个阶段:
1)11 Hz/s<转子旋转频率的变化率<25 Hz/s。
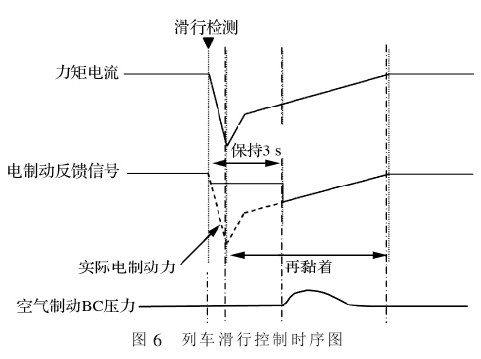
西安地铁 2 号线车辆牵引系统与空气制动系统之间无电制动防滑反馈线。当列车在制动,某节车发生了滑行时,系统立刻减少本节车逆变器的输出电流,由于无电制动防滑反馈线, 这时空气制动系统会误判断为此刻电制动减小为电制动力不足, 从而迅速通过增加本车空气制动来补充,导致总的制动力未减少,防滑效果不明显。为防止此现象的发生,日立公司在处理牵引与空气制动的接口时进行了如下设计:
如图 6 所示, 当检测出转子旋转频率的变化率大于11 Hz/s 时,系统判断本节车发生了滑行,立刻减小本节车逆变器的输出电流, 同时牵引系统给空气制动系统 3 s 的虚假信号 (即电制动力不变的虚拟信号),3 s 后牵引系统给空气制动系统实际的电制动信号,由于此时电制动力已经上升, 所以补充的空气制动力上升不大。 当逆变器输出电流值上升到正常值后仍然检测出本节车滑行,继续进行如上控制,如此往复,直到恢复黏着。
2)转子旋转频率的变化率≥25 Hz/s。
当电机转子旋转频率的变化率大于 25 Hz/s 时,系统判断此时滑行为大滑行(严重滑行),系统关闭逆变器的门极, 封锁牵引逆变器, 此时电制动防滑系统失效,后续滑行由空气制动防滑系统进行控制及调整。
3) 电制动工况 , 电机转子旋转频率的变化率﹤25 Hz/s。当列车在制动时若发生了滑行,电机转子旋转频率的变化率小于 25 Hz/s,同时防滑系统未将滑行调整过来,将导致电机转子旋转频率变为零,轮对抱死。为防止此类现象的发生,牵引系统内设置了“速度推定异常”的保护机制。 逆变器在工作时,当推测出电机转子旋转频率为零,并且此状态维持时间大于 6 s,系统关闭逆变器门极及 LB (线路接触器), 此时电制动失效,后续滑行由空气制动防滑系统进行控制及调整。
3.3 牵引工况下空转的检测及控制
牵引工况下空转的检测及控制与电制动工况下滑行的检测及控制是一样的。
牵引工况下空转的控制, 根据空转严重程度的不同大概分如下 2 个阶段:
1)5 Hz/s<转子旋转频率的变化率<14.3 Hz/s。
当转子旋转频率的变化率大于 5 Hz/s 时, 系统判断为此车发生了空转。当某轮对发生空转后,此轴的电机转子频率急剧增大, 这时系统通过控制逆变器的门极,减小扭矩电流 Iqp,抑制空转滑行,从而使轮对与钢轨恢复原来的黏着状态。
2)转子旋转频率的变化率≥14.3 Hz/s。
当电机转子旋转频率的变化率大于 14.3 Hz/s 后,系统判断此时空转比较严重(大滑行),通过正常方法控制效果不明显,此时系统关闭逆变器的门极,牵引封锁。
4 空转/滑行控制系统的失效
当地铁车辆实施电制动时, 若动车的滑行控制系统失效,则该车的电制动将被切除,由空气制动取 代。当空气制动滑行控制系统失效时, 空气制动将维持运用而无滑行保护。
当地铁车辆牵引时,空转控制系统失效,列车继续牵引而无空转保护。 当空转/滑行控制系统失效时,监控系统向司机提示。
5 结束语
综上所述, 西安地铁 2 号线车辆防空转/滑行系统与其它地铁车辆相比具有以下特点:
1)虽然 2 号线车辆的空气制动控制采用车控方式,但空气制动下的防滑是对单轴进行控制, 即当检测出某一轮对发生滑行时, 系统通过控制此轴的防滑阀来进行调整。
2)2 号线车辆 1 个牵引逆变器控制一节动车上的4 台电机,当动车的一个轴发生了空转/滑行,系统通过减少牵引逆变器的输出电流对并联的 4 个电机同时进行控制。
3)2 号线车辆牵引系统的控制采用无速度传感器的矢量控制技术,车辆空转、滑行(电制动)系统是通过电机定子旋转磁场的旋转频率以及转子电流来推测车辆的加(减)速度来判断的。 当判断出某一轴发生了空转/滑行时,牵引逆变器通过控制 IGBT 的门极,改变逆变器输出电流的大小来控制并联的 4 台电机, 最终进行空转/滑行的调整。
4)和一般地铁车辆相比,2 号线车辆牵引系统通过软件设计取代了传统的 VVVF 与 BECU 之间电制动防滑反馈线的功能。当在电制动出现滑行时,牵引系统通过给空气制动系统 3 s 的虚拟信号(电制动力减小,但给制动控制单元的信号未变),从而实现了在电制动防滑减少电机电流时,空气制动不进行空气制动补充。
5)2 号线车辆根据空转/滑行程度的不同, 设置不同的控制方式。 当轮对出现空转/滑行后,系统选择最优的方案、最快地进行调整,从而使列车在牵引及制动时都可以最大限度地利用轮轨之间的黏着, 提高列车运行的安全性及舒适性。
参考文献:
[1] 西安市地下铁道有限责任公司. 西安地铁二号线车辆合同文件[G]. 西安:西安市地下铁道有限责任公司,2008.
[2] 刘宝林. 无速度传感器矢量控制系统在地铁车辆上的应用[J]. 电力机车与城轨车辆,2007(2).
[3] 陈军华,胡铁军. 广州地铁 1 号线车辆防空转/防滑系统[J]. 城市轨道车辆,2002(1).
[4] 李培曙. 高速车辆的防滑控制欲滑行检测[J]. 铁道车辆,1996(12).
[5] 姜祥禄,蔡永丽. 地铁车辆 EP2002 制动系统防滑保护[J]. 电力机车与城轨车辆,2008(4).
[6] 渡边朝纪. 新干线高速化用的 PWM 逆变器的空转滑行再黏着控制[J].电力牵引快报,1996(1).























 京公网安备 11010202007575号
京公网安备 11010202007575号