城市轨道交通的隧道结构断面测量方法
【摘 要】本文就城市轨道交通的隧道结构断面的测量方法进行了研究,提出了一种采用地面激光扫描仪技术的测量方法,研究了此方法的主要工作流程、基本原理和方法。把此方法用到天津城市轨道交通二号线工程,使用地面激光扫描仪测量隧道的结构断面,其精度和效率较常规仪器和方法都有显著提高。
【关键词】地面激光扫描仪; 结构断面测量; 地铁盾构; 激光点云
1 引言
城市轨道交通以安全、快捷、无障碍、低能耗特征为解决城市交通拥堵提供重要手段。近年来,城市轨道在我国得到迅速发展。城市轨道交通的隧道结构断面测量是检验土建施工后结构断面尺寸、隧道有效净空、隧道的实际盾构中心线是否满足设计要求的测量[1]。常规的结构断面测量方法有全站仪解析法、断面仪逐点扫描法、近景摄影测量法等[2,3]。此类测量方法需要的测量环境苛刻、测量的效率低、测量精度低,已经不能满足高精度的地铁调线调坡测量需求。
本文提出用地面激光扫描仪来解决此问题,并对其原理与具体实施方法以及工作流程进行了研究,并用实例分析了本方法的优越性。
2 基本原理与方法
2. 1 隧道精密控制测量
隧道控制测量包括地面控制测量、竖井联系测量、洞内控制测量[4,5]。本文在隧道精密控制测量分别使用如下方法: 洞外平面控制测量采用 GPS 测量方法,按照国家 GPS四等测量的要求布设与实测,控制点一般成对布设在隧道洞口的建筑物上; 水准测量按照国家二等水准测量要求施测,在远离洞口 300m 外的稳固建筑物墙上布设水准点; 竖井联系测量的平面测量采用高精度全站仪分层多转折站方法,使用铅垂仪、陀螺经纬仪联合定向复核,高程测量使用等长杆三角测量分层传递高程,垂吊钢丝检核精度; 洞内按照城市四等符合导线要求,相邻两车站底板上传递的平面控制点构成符合导线,使用水准仪按照二等水准的要求测量导线点的高程,进而形成隧道内三维控制点。
2. 2 自由设站盾构区间扫描
地面激光扫描仪根据测距原理分为相位式与脉冲式。相位式激光扫描仪的标称扫描范围约是 75m ( 如徕卡HDS6100) ,激光脉冲式扫描仪的标称扫描范围可以达到1km[6]。受地铁盾构区间狭长的扫描空间及各类噪声影响,要获取隧道区间的有效点云数据,须分段扫描。本文使用了扫描速度较快、单点定位精度高的 HDS6100 扫描仪,相邻扫描站之间的距离控制在 45m 内。每一扫描站自由架设扫描仪,同时使用全站仪无棱镜模式测量标靶中心点三维坐标。通过标靶中心坐标的相对点位与绝对点位,七参数转化方法纠正点云坐标,最后拼接为一条完整的地铁盾构区间。
2. 3 三维重建
1) 分段式管片三维重建: 地铁盾构区间是由管片构成的直线与曲线交替的圆柱形。预制管片的长度一般为1. 2m,圆柱的设计直径为 5. 5m。在需要量测的结构断面点对应的里程上,重建宽度为 0. 2m 的盾构模型。针对目前地铁隧道采用盾构机直接盾构,每段管片成圆柱形较准确,所以使用圆柱形去分段拟合隧道模型。
2) 断面里程上盾构轮廓线拟合: 根据设计的中心线位,在需要测量结构断面对应的里程点上,垂直线位方向上建立一个临时参考面。参考面与上一步重建的管片相交的部分拟合一个闭合的曲线,此曲线即是结构断面点对应的隧道轮廓线。
2. 4 结构断面自动量测
地铁调线调坡测量在满足调线、调坡技术要求的前提,通过测量,反映隧道结构内轮廓及高程现状,为调线调坡设计提供基础数据。具体测量点位如图 1 所示。
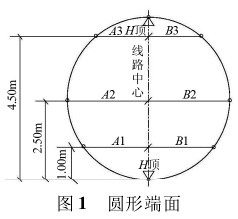
A1( 左下) 、A2( 左中) 、A3( 左上) 、B1 ( 右下) 、B2( 右中) 、B3( 右上) 为相应各点与线路中线的距离,H 顶、H 底为线路中线上对应的顶板和地板绝对高程。结构断面测量始终是面向大里程方向,是反应垂直里程方向上盾构情况。内业量测可以先在线位中线作一条铅垂线 H顶H底,然后在垂直线位和中线铅垂线( H顶H底) ,分别作 3 条水平线 A1B1、A2B2、A3B3。中线铅垂线与 3 条水平线与隧道轮廓线的交点是需要量测的结构断面点,自动获取这 8 个交点的坐标,通过计算既可生成结构断面成果表。
2. 5 工作流程
其主要工作流程为以下 4 步: ①扫描控制点测量: 在地铁盾构内布设精密的三维控制网,此控制网是扫描仪测量的基准网; ②隧道洞内扫描: 扫描仪自由设站、分站式获取地铁盾构区间的三维点云数据,同时测量每扫描站标靶的大地坐标; ③隧道三维重建: 依据扫描的激光点云数据,分段三维重建地铁盾构模型; ④自动量测结构断面:在重建的盾构三维模型上量测隧道的结构断面。
3 实例分析
本文以天津城市轨道交通二号线工程为实验区,于2009 年 11 月至 2010 年 5 月进行了扫描控制点的隧道精密控制测量和地面三维激光扫描仪外业数据获取实验。通过对三维激光点云数据内业处理,分段式完成隧道模型的三维重建,在重建的盾构模型上量测隧道结构断面。
3. 1 隧道结构断面线拟合
隧道结构断面线是反映地铁隧道在盾构竣工后的结构特征线,通过与设计线位的比较,可以检测施工过程中的偏差。根据扫描的高密度激光点云数据,在规定设计线位里程上垂直切割一定宽度的激光点云。利用切割的点云三维重建隧道管片模型,再在模型上拟合断面线。
1) 设计平面线位的编辑: 地铁设计平面图一般包含线位中心线、地面构筑物、地下管线、道路、植被等地物信息。结构断面是设计线位对应位置的纵断面与实测值比较,这里只提取设计平面图线位中心线,并加以编辑,满足调线调坡等专项测量对断面里程的要求,如图 2 所示。
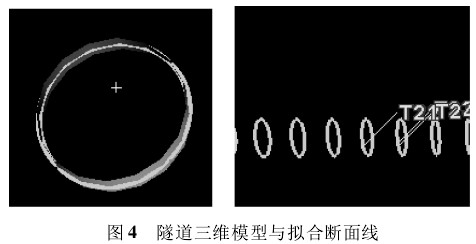
2) 分段切割激光点云: 隧道结构断面一般是根据设计线位中心线等间隔测量的,另外增加一些线位特征点的断面。在需要测量结构断面的隧道点云上切割一定宽度的激光点云数据,如图 3 所示。线路中心线平面和纵断面是分开成图的,计算线路中心线垂直的剖面,以此剖面分段切割点云。
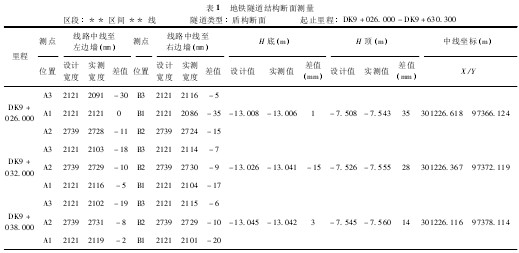
3) 隧道模型重建与断面线拟合: 依据上部分段切割的激光点云数据,三维重建隧道的三维模型,在模型的法面线上拟合结构断面线,如图 4 所示。
3. 2 结构断面成果表自动生成
在分段提取的隧道断面线上,依据设计线位,生成 3条水平和一条垂直的直线段,直线段与剖面线的交点即是断面点。
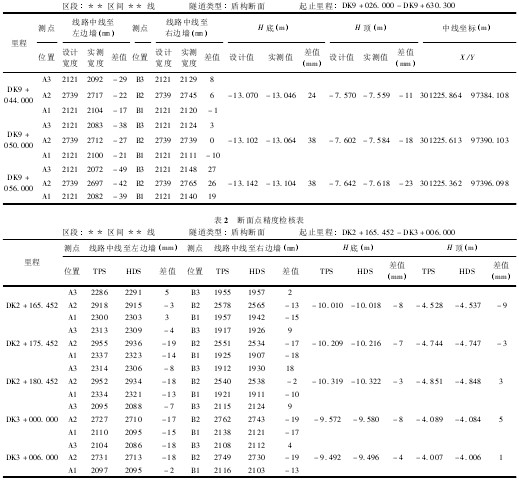
隧道结构断面成果表计算断面点设计值与测量值,以及与设计平面距离、板底、板顶高程的差值。通过与设计值的比较,可以容易的发现隧道盾构施工的偏差量; 通过两次监测值比较,可以计算监测点的变化量等信息,如表 1所示。
4 结果分析
通过断面点与全站仪 TPS800 实际测量值对比分析: 高程上差值在 10mm 以内,满足 《城市轨道交通测量规范》在高程上 10mm 误差精度要求[2,3]; 垂直线位方向上差值在20mm 以内,满足 《城市轨道交通测量规范》 在垂直线位上 20mm 误差精度要求[2,3]。同时分析全站仪测量过程可以发现,全站仪测量过程中,放样断面底点存在一次放样误差,设站在放样点上测量断面其他点距离又增加一次设站误差,根据误差累计的原理,全站仪检测值在垂直线位上的差值( 20mm) 要大于放样点的高程差值( 10mm) ,如表 2所示。
5 结束语
从上述结果可知,使用地面激光扫描仪测量隧道的结构断面,其精度和效率较常规仪器和方法都有显著提高。
参考文献
[1] 王荣权 . 轨道交通工程隧道结构断面测量技术与方法[J]. 铁道勘察,2008,34( 1) : 17-19.
[2] 中华人民共和国行业规范 . GB50308-2008 城市轨道交通工程测量规范[S]. 北京: 人民交通出版社,2008.
[3] 中华人民共和国行业规范 . TB10101-2009 铁路工程测量规范[S]. 北京: 人民交通出版社,2009.
[4] 李青岳,陈永奇 . 工程测量学( 第三版) [M]. 北京: 测绘出版社,2008.
[5] 潘国荣,王穗辉 . 地铁盾构施工中的若干测量方法手段及方法[J]. 测绘通报,2001,( 1) : 23-25.
[6] 潘国荣,王穗辉 . 上海地铁二号线隧道贯通定向技术及精确控制[J]. 同济大学学报,2000,35( 1) : 122-126.























 京公网安备 11010202007575号
京公网安备 11010202007575号